")
Community hub
Recent from talks
Contribute something to knowledge base
Content stats: 0 posts, 0 articles, 1 media, 0 notes
Members stats: 0 subscribers, 0 contributors, 0 moderators, 0 supporters
Subscribers
Supporters
Contributors
Moderators
Cross section (geometry)
In geometry and science, a cross section is the non-empty intersection of a solid body in three-dimensional space with a plane, or the analog in higher-dimensional spaces. Cutting an object into slices creates many parallel cross-sections. The boundary of a cross-section in three-dimensional space that is parallel to two of the axes, that is, parallel to the plane determined by these axes, is sometimes referred to as a contour line; for example, if a plane cuts through mountains of a raised-relief map parallel to the ground, the result is a contour line in two-dimensional space showing points on the surface of the mountains of equal elevation.
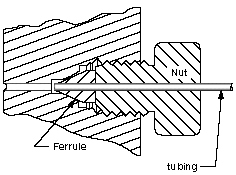
In technical drawing a cross-section, being a projection of an object onto a plane that intersects it, is a common tool used to depict the internal arrangement of a 3-dimensional object in two dimensions. It is traditionally crosshatched with the style of crosshatching often indicating the types of materials being used.
With computed axial tomography, computers can construct cross-sections from x-ray data.
If a plane intersects a solid (a 3-dimensional object), then the region common to the plane and the solid is called a cross-section of the solid. A plane containing a cross-section of the solid may be referred to as a cutting plane.
The shape of the cross-section of a solid may depend upon the orientation of the cutting plane to the solid. For instance, while all the cross-sections of a ball are disks, the cross-sections of a cube depend on how the cutting plane is related to the cube. If the cutting plane is perpendicular to a line joining the centers of two opposite faces of the cube, the cross-section will be a square, however, if the cutting plane is perpendicular to a diagonal of the cube joining opposite vertices, the cross-section can be either a point, a triangle or a hexagon.
A related concept is that of a plane section, which is the curve of intersection of a plane with a surface. Thus, a plane section is the boundary of a cross-section of a solid in a cutting plane.
If a surface in a three-dimensional space is defined by a function of two variables, i.e., z = f(x, y), the plane sections by cutting planes that are parallel to a coordinate plane (a plane determined by two coordinate axes) are called level curves or isolines. More specifically, cutting planes with equations of the form z = k (planes parallel to the xy-plane) produce plane sections that are often called contour lines in application areas.
A cross section of a polyhedron is a polygon.
Cross section (geometry)
In geometry and science, a cross section is the non-empty intersection of a solid body in three-dimensional space with a plane, or the analog in higher-dimensional spaces. Cutting an object into slices creates many parallel cross-sections. The boundary of a cross-section in three-dimensional space that is parallel to two of the axes, that is, parallel to the plane determined by these axes, is sometimes referred to as a contour line; for example, if a plane cuts through mountains of a raised-relief map parallel to the ground, the result is a contour line in two-dimensional space showing points on the surface of the mountains of equal elevation.
In technical drawing a cross-section, being a projection of an object onto a plane that intersects it, is a common tool used to depict the internal arrangement of a 3-dimensional object in two dimensions. It is traditionally crosshatched with the style of crosshatching often indicating the types of materials being used.
With computed axial tomography, computers can construct cross-sections from x-ray data.
If a plane intersects a solid (a 3-dimensional object), then the region common to the plane and the solid is called a cross-section of the solid. A plane containing a cross-section of the solid may be referred to as a cutting plane.
The shape of the cross-section of a solid may depend upon the orientation of the cutting plane to the solid. For instance, while all the cross-sections of a ball are disks, the cross-sections of a cube depend on how the cutting plane is related to the cube. If the cutting plane is perpendicular to a line joining the centers of two opposite faces of the cube, the cross-section will be a square, however, if the cutting plane is perpendicular to a diagonal of the cube joining opposite vertices, the cross-section can be either a point, a triangle or a hexagon.
A related concept is that of a plane section, which is the curve of intersection of a plane with a surface. Thus, a plane section is the boundary of a cross-section of a solid in a cutting plane.
If a surface in a three-dimensional space is defined by a function of two variables, i.e., z = f(x, y), the plane sections by cutting planes that are parallel to a coordinate plane (a plane determined by two coordinate axes) are called level curves or isolines. More specifically, cutting planes with equations of the form z = k (planes parallel to the xy-plane) produce plane sections that are often called contour lines in application areas.
A cross section of a polyhedron is a polygon.
Recent media
Recent media