Recent from talks
Decentralised system
Knowledge base stats:
Talk channels stats:
Members stats:
Decentralised system
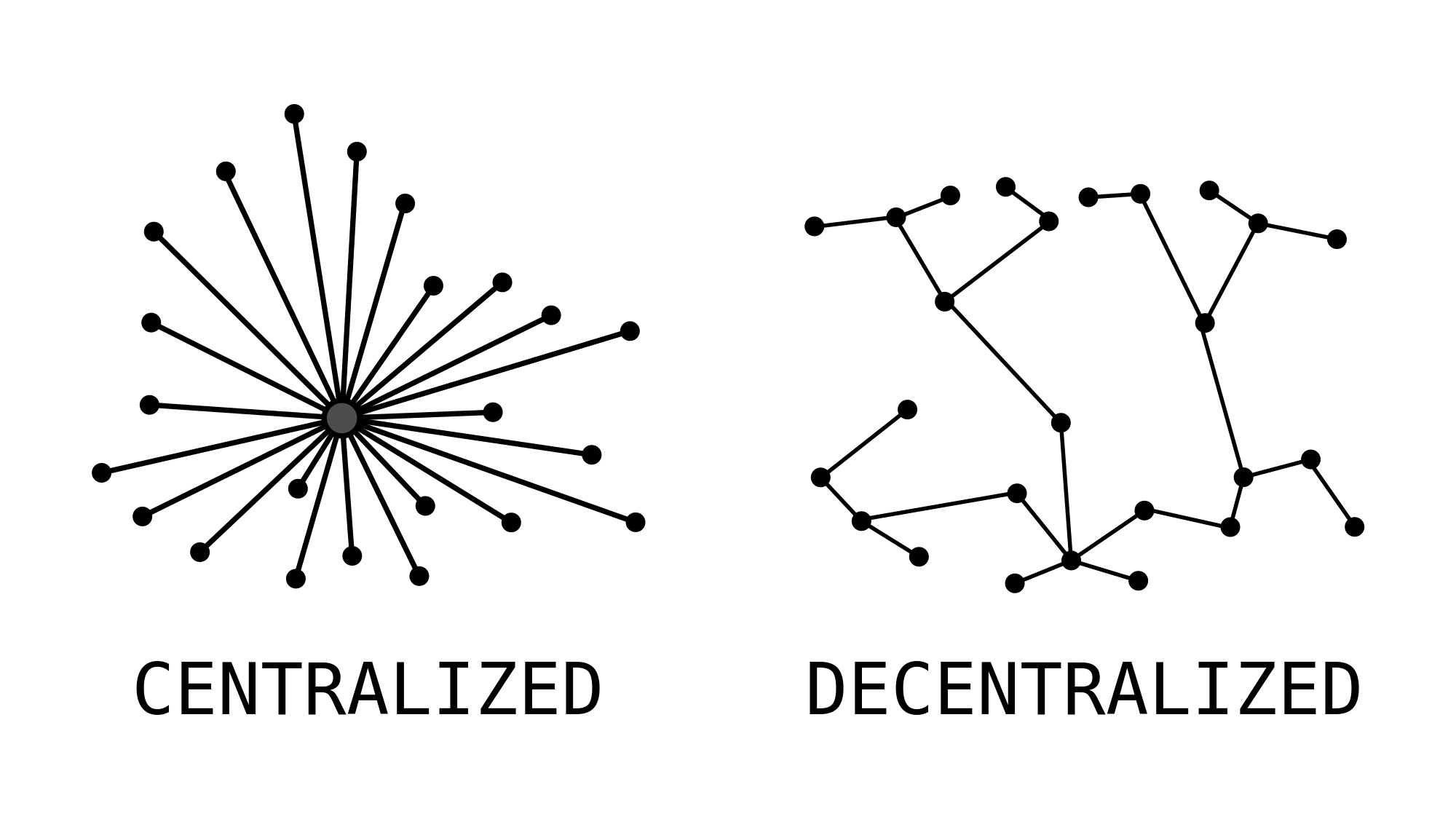
A decentralised system in systems theory is a system in which lower level components operate on local information to accomplish global goals. The global pattern of behaviour is an emergent property of dynamical mechanisms that act upon local components, such as indirect communication, rather than the result of a central ordering influence of a centralised system.
A centralised system is one in which a central controller exercises control over the lower-level components of the system directly or through the use of a power hierarchy (such as instructing a middle level component to instruct a lower level component). The complex behaviour exhibited by this system is thus the result of the central controller's "control" over lower level components in the system, including the active supervision of the lower-level components.
A decentralised system, on the other hand, is one in which complex behaviour emerges through the work of lower level components operating on local information, not the instructions of any commanding influence. This form of control is known as distributed control, or control in which each component of the system is equally responsible for contributing to the global, complex behaviour by acting on local information in the appropriate manner. The lower level components are implicitly aware of these appropriate responses through mechanisms that are based on the component's interaction with the environment, including other components in that environment.
Decentralised systems are intricately linked to the idea of self-organisation—a phenomenon in which local interactions between components of a system establish order and coordination to achieve global goals without a central commanding influence. The rules specifying these interactions emerge from local information and in the case of biological (or biologically-inspired) agents, from the closely linked perception and action system of the agents. These interactions continually form and depend on spatio-temporal patterns, which are created through the positive and negative feedback that the interactions provide. For example, recruitment in the foraging behaviour of ants relies on the positive feedback of the ant finding food at the end of a pheromone trail while ants' task-switching behaviour relies on the negative feedback of making antennal contact with a certain number of ants (for example, a sufficiently low encounter rate with successful foragers can cause a midden worker to switch to foraging, although other factors like food availability can affect the threshold for switching).
While decentralised systems can easily be found in nature, they are also evident in aspects of human society such as governmental and economic systems.
One of the most well known examples of a "natural" decentralized system is one used by certain insect colonies. In these insect colonies, control is distributed among the homogeneous biological agents who act upon local information and local interactions to collectively create complex, global behaviour. While individually exhibiting simple behaviours, these agents achieve global goals such as feeding the colony or raising the brood by using dynamical mechanisms like non-explicit communication and exploiting their closely coupled action and perception systems. Without any form of central control, these insect colonies achieve global goals by performing required tasks, responding to changing conditions in the colony environment in terms of task-activity, and subsequently adjusting the number of workers performing each task to ensure that all tasks are completed. For example, ant colonies guide their global behaviour (in terms of foraging, patrolling, brood care, and nest maintenance) using a pulsing, shifting web of spatio-temporal patterned interactions that rely on antennal contact rate and olfactory sensing. While these interactions consist of both interactions with the environment and each other, ants do not direct the behaviour of other ants and thus never have a "central controller" dictating what is to be done to achieve global goals.
Instead, ants use a flexible task-allocation system that allows the colony to respond rapidly to changing needs for achieving these goals. This task-allocation system, similar to a division of labor is flexible in that all tasks rely on either the number of ant encounters (which take the form of antennal contact) and the sensing of chemical gradients (using olfactory sensing for pheromone trails) and can thus be applied to the entire ant population. While recent research has shown that certain tasks may have physiologically and age-based response thresholds, all tasks can be completed by "any" ant in the colony.
For example, in foraging behaviour, red harvester ants (Pogonomyrmex barbatus) communicate to other ants where food is, how much food there is, and whether or not they should switch tasks to forage based on cuticular hydrocarbon scents and the rate of ant-interaction. By using the combined odors of forager cuticular hydrocarbons and of seeds and interaction rate using brief antennal contact, the colony captures precise information about the current availability of food and thus whether or not they should switch to foraging behaviour "all without being directed by a central controller or even another ant". The rate at which foragers return with seeds sets the rate at which outgoing foragers leave the nest on foraging trips; faster rates of return indicate more food availability and fewer interactions indicate a greater need for foragers. A combination of these two factors, which are solely based on local information from the environment, leads to decisions about switching to the foraging task and ultimately, to achieving the global goal of feeding the colony.
Hub AI
Decentralised system AI simulator
(@Decentralised system_simulator)
Decentralised system
A decentralised system in systems theory is a system in which lower level components operate on local information to accomplish global goals. The global pattern of behaviour is an emergent property of dynamical mechanisms that act upon local components, such as indirect communication, rather than the result of a central ordering influence of a centralised system.
A centralised system is one in which a central controller exercises control over the lower-level components of the system directly or through the use of a power hierarchy (such as instructing a middle level component to instruct a lower level component). The complex behaviour exhibited by this system is thus the result of the central controller's "control" over lower level components in the system, including the active supervision of the lower-level components.
A decentralised system, on the other hand, is one in which complex behaviour emerges through the work of lower level components operating on local information, not the instructions of any commanding influence. This form of control is known as distributed control, or control in which each component of the system is equally responsible for contributing to the global, complex behaviour by acting on local information in the appropriate manner. The lower level components are implicitly aware of these appropriate responses through mechanisms that are based on the component's interaction with the environment, including other components in that environment.
Decentralised systems are intricately linked to the idea of self-organisation—a phenomenon in which local interactions between components of a system establish order and coordination to achieve global goals without a central commanding influence. The rules specifying these interactions emerge from local information and in the case of biological (or biologically-inspired) agents, from the closely linked perception and action system of the agents. These interactions continually form and depend on spatio-temporal patterns, which are created through the positive and negative feedback that the interactions provide. For example, recruitment in the foraging behaviour of ants relies on the positive feedback of the ant finding food at the end of a pheromone trail while ants' task-switching behaviour relies on the negative feedback of making antennal contact with a certain number of ants (for example, a sufficiently low encounter rate with successful foragers can cause a midden worker to switch to foraging, although other factors like food availability can affect the threshold for switching).
While decentralised systems can easily be found in nature, they are also evident in aspects of human society such as governmental and economic systems.
One of the most well known examples of a "natural" decentralized system is one used by certain insect colonies. In these insect colonies, control is distributed among the homogeneous biological agents who act upon local information and local interactions to collectively create complex, global behaviour. While individually exhibiting simple behaviours, these agents achieve global goals such as feeding the colony or raising the brood by using dynamical mechanisms like non-explicit communication and exploiting their closely coupled action and perception systems. Without any form of central control, these insect colonies achieve global goals by performing required tasks, responding to changing conditions in the colony environment in terms of task-activity, and subsequently adjusting the number of workers performing each task to ensure that all tasks are completed. For example, ant colonies guide their global behaviour (in terms of foraging, patrolling, brood care, and nest maintenance) using a pulsing, shifting web of spatio-temporal patterned interactions that rely on antennal contact rate and olfactory sensing. While these interactions consist of both interactions with the environment and each other, ants do not direct the behaviour of other ants and thus never have a "central controller" dictating what is to be done to achieve global goals.
Instead, ants use a flexible task-allocation system that allows the colony to respond rapidly to changing needs for achieving these goals. This task-allocation system, similar to a division of labor is flexible in that all tasks rely on either the number of ant encounters (which take the form of antennal contact) and the sensing of chemical gradients (using olfactory sensing for pheromone trails) and can thus be applied to the entire ant population. While recent research has shown that certain tasks may have physiologically and age-based response thresholds, all tasks can be completed by "any" ant in the colony.
For example, in foraging behaviour, red harvester ants (Pogonomyrmex barbatus) communicate to other ants where food is, how much food there is, and whether or not they should switch tasks to forage based on cuticular hydrocarbon scents and the rate of ant-interaction. By using the combined odors of forager cuticular hydrocarbons and of seeds and interaction rate using brief antennal contact, the colony captures precise information about the current availability of food and thus whether or not they should switch to foraging behaviour "all without being directed by a central controller or even another ant". The rate at which foragers return with seeds sets the rate at which outgoing foragers leave the nest on foraging trips; faster rates of return indicate more food availability and fewer interactions indicate a greater need for foragers. A combination of these two factors, which are solely based on local information from the environment, leads to decisions about switching to the foraging task and ultimately, to achieving the global goal of feeding the colony.
Recent media