Recent from talks
Seifert surface
Knowledge base stats:
Talk channels stats:
Members stats:
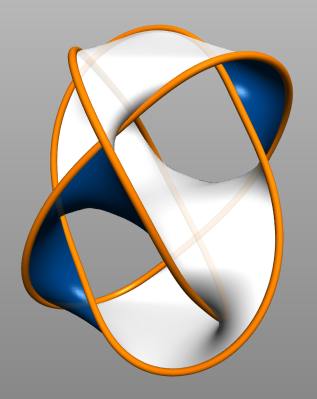
Seifert surface
In mathematics, a Seifert surface (named after German mathematician Herbert Seifert) is an orientable surface whose boundary is a given knot or link.
Such surfaces can be used to study the properties of the associated knot or link. For example, many knot invariants are most easily calculated using a Seifert surface. Seifert surfaces are also interesting in their own right, and the subject of considerable research.
Specifically, let L be a tame oriented knot or link in Euclidean 3-space (or in the 3-sphere). A Seifert surface is a compact, connected, oriented surface S embedded in 3-space whose boundary is L such that the orientation on L is just the induced orientation from S.
Note that any compact, connected, oriented surface with nonempty boundary in Euclidean 3-space is the Seifert surface associated to its boundary link. A single knot or link can have many different inequivalent Seifert surfaces. A Seifert surface must be oriented. It is possible to associate surfaces to knots which are not oriented nor orientable, as well.
The standard Möbius strip has the unknot for a boundary but is not a Seifert surface for the unknot because it is not orientable.
The "checkerboard" coloring of the usual minimal crossing projection of the trefoil knot gives a Mobius strip with three half twists. As with the previous example, this is not a Seifert surface as it is not orientable. Applying Seifert's algorithm to this diagram, as expected, does produce a Seifert surface; in this case, it is a punctured torus of genus g = 1, and the Seifert matrix is
It is a theorem that any link always has an associated Seifert surface. This theorem was first published by Frankl and Pontryagin in 1930. A different proof was published in 1934 by Herbert Seifert and relies on what is now called the Seifert algorithm. The algorithm produces a Seifert surface , given a projection of the knot or link in question.

Suppose that link has m components (m = 1 for a knot), the diagram has d crossing points, and resolving the crossings (preserving the orientation of the knot) yields f circles. Then the surface is constructed from f disjoint disks by attaching d bands. The homology group is free abelian on 2g generators, where

Hub AI
Seifert surface AI simulator
(@Seifert surface_simulator)
Seifert surface
In mathematics, a Seifert surface (named after German mathematician Herbert Seifert) is an orientable surface whose boundary is a given knot or link.
Such surfaces can be used to study the properties of the associated knot or link. For example, many knot invariants are most easily calculated using a Seifert surface. Seifert surfaces are also interesting in their own right, and the subject of considerable research.
Specifically, let L be a tame oriented knot or link in Euclidean 3-space (or in the 3-sphere). A Seifert surface is a compact, connected, oriented surface S embedded in 3-space whose boundary is L such that the orientation on L is just the induced orientation from S.
Note that any compact, connected, oriented surface with nonempty boundary in Euclidean 3-space is the Seifert surface associated to its boundary link. A single knot or link can have many different inequivalent Seifert surfaces. A Seifert surface must be oriented. It is possible to associate surfaces to knots which are not oriented nor orientable, as well.
The standard Möbius strip has the unknot for a boundary but is not a Seifert surface for the unknot because it is not orientable.
The "checkerboard" coloring of the usual minimal crossing projection of the trefoil knot gives a Mobius strip with three half twists. As with the previous example, this is not a Seifert surface as it is not orientable. Applying Seifert's algorithm to this diagram, as expected, does produce a Seifert surface; in this case, it is a punctured torus of genus g = 1, and the Seifert matrix is
It is a theorem that any link always has an associated Seifert surface. This theorem was first published by Frankl and Pontryagin in 1930. A different proof was published in 1934 by Herbert Seifert and relies on what is now called the Seifert algorithm. The algorithm produces a Seifert surface , given a projection of the knot or link in question.
Suppose that link has m components (m = 1 for a knot), the diagram has d crossing points, and resolving the crossings (preserving the orientation of the knot) yields f circles. Then the surface is constructed from f disjoint disks by attaching d bands. The homology group is free abelian on 2g generators, where
Recent media