Community hub
Inversive geometry
View on WikipediaIn geometry, inversive geometry is the study of inversion, a transformation of the Euclidean plane that maps circles or lines to other circles or lines and that preserves the angles between crossing curves. Many difficult problems in geometry become much more tractable when an inversion is applied. Inversion seems to have been discovered by a number of people contemporaneously, including Steiner (1824), Quetelet (1825), Bellavitis (1836), Stubbs and Ingram (1842–3) and Kelvin (1845).[1] The concept of inversion can be generalized to higher-dimensional spaces.
Inversion in a circle
[edit]Inverse of a point
[edit]
To invert a number in arithmetic usually means to take its reciprocal. A closely related idea in geometry is that of "inverting" a point. In the plane, the inverse of a point P with respect to a reference circle (Ø) with center O and radius r is a point P', lying on the ray from O through P such that

This is called circle inversion or plane inversion. The inversion taking any point P (other than O) to its image P' also takes P' back to P, so the result of applying the same inversion twice is the identity transformation which makes it a self-inversion (i.e. an involution).[2][3] To make the inversion a total function that is also defined for O, it is necessary to introduce a point at infinity, a single point placed on all the lines, and extend the inversion, by definition, to interchange the center O and this point at infinity.
It follows from the definition that the inversion of any point inside the reference circle must lie outside it, and vice versa, with the center and the point at infinity changing positions, whilst any point on the circle is unaffected (is invariant under inversion). In summary, for a point inside the circle, the nearer the point to the center, the further away its transformation. While for any point (inside or outside the circle), the nearer the point to the circle, the closer its transformation.
Compass and straightedge construction
[edit]
Point outside circle
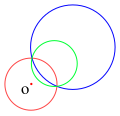
[edit]To construct the inverse P' of a point P outside a circle Ø:
- Draw the segment from O (center of circle Ø) to P.
- Let M be the midpoint of OP. (Not shown)
- Draw the circle c with center M going through P. (Not labeled. It's the blue circle)
- Let N and N' be the points where Ø and c intersect.
- Draw segment NN'.
- P' is where OP and NN' intersect.
Point inside circle
[edit]To construct the inverse P of a point P' inside a circle Ø:
- Draw ray r from O (center of circle Ø) through P'. (Not labeled, it's the horizontal line)
- Draw line s through P' perpendicular to r. (Not labeled. It's the vertical line)
- Let N be one of the points where Ø and s intersect.
- Draw the segment ON.
- Draw line t through N perpendicular to ON.
- P is where ray r and line t intersect.
Dutta's construction
[edit]There is a construction of the inverse point to A with respect to a circle Ø that is independent of whether A is inside or outside Ø.[4]
Consider a circle Ø with center O and a point A which may lie inside or outside the circle Ø.
- Take the intersection point C of the ray OA with the circle Ø.
- Connect the point C with an arbitrary point B on the circle Ø (different from C and from the point on Ø antipodal to C)
- Let h be the reflection of ray BA in line BC. Then h cuts ray OC in a point A'. A' is the inverse point of A with respect to circle Ø.[4]: § 3.2
Properties
[edit]-
 The inverse, with respect to the red circle, of a circle going through O (blue) is a line not going through O (green), and vice versa.
The inverse, with respect to the red circle, of a circle going through O (blue) is a line not going through O (green), and vice versa. -
 The inverse, with respect to the red circle, of a circle not going through O (blue) is a circle not going through O (green), and vice versa.
The inverse, with respect to the red circle, of a circle not going through O (blue) is a circle not going through O (green), and vice versa. -
 Inversion with respect to a circle does not map the center of the circle to the center of its image
Inversion with respect to a circle does not map the center of the circle to the center of its image



The inversion of a set of points in the plane with respect to a circle is the set of inverses of these points. The following properties make circle inversion useful.
- A circle that passes through the center O of the reference circle inverts to a line not passing through O, but parallel to the tangent to the original circle at O, and vice versa; whereas a line passing through O is inverted into itself (but not pointwise invariant).[5]
- A circle not passing through O inverts to a circle not passing through O. If the circle meets the reference circle, these invariant points of intersection are also on the inverse circle. A circle (or line) is unchanged by inversion if and only if it is orthogonal to the reference circle at the points of intersection.[5]
Additional properties include:
- If a circle q passes through two distinct points A and A' which are inverses with respect to a circle k, then the circles k and q are orthogonal.
- If the circles k and q are orthogonal, then a straight line passing through the center O of k and intersecting q, does so at inverse points with respect to k.
- Given a triangle OAB in which O is the center of a circle k, and points A' and B' inverses of A and B with respect to k, then

- The points of intersection of two circles p and q orthogonal to a circle k, are inverses with respect to k.
- If M and M' are inverse points with respect to a circle k on two curves m and m', also inverses with respect to k, then the tangents to m and m' at the points M and M' are either perpendicular to the straight line MM' or form with this line an isosceles triangle with base MM'.
- Inversion leaves the measure of angles unaltered, but reverses the orientation of oriented angles.[6]
Examples in two dimensions
[edit]
- Inversion of a line is a circle containing the center of inversion; or it is the line itself if it contains the center
- Inversion of a circle is another circle; or it is a line if the original circle contains the center
- Inversion of a parabola is a cardioid
- Inversion of hyperbola is a lemniscate of Bernoulli
Application
[edit]For a circle not passing through the center of inversion, the center of the circle being inverted and the center of its image under inversion are collinear with the center of the reference circle. This fact can be used to prove that the Euler line of the intouch triangle of a triangle coincides with its OI line. The proof roughly goes as below:
Invert with respect to the incircle of triangle ABC. The medial triangle of the intouch triangle is inverted into triangle ABC, meaning the circumcenter of the medial triangle, that is, the nine-point center of the intouch triangle, the incenter and circumcenter of triangle ABC are collinear.
Any two non-intersecting circles may be inverted into concentric circles. Then the inversive distance (usually denoted δ) is defined as the natural logarithm of the ratio of the radii of the two concentric circles.
In addition, any two non-intersecting circles may be inverted into congruent circles, using circle of inversion centered at a point on the circle of antisimilitude.
The Peaucellier–Lipkin linkage is a mechanical implementation of inversion in a circle. It provides an exact solution to the important problem of converting between linear and circular motion.
Pole and polar
[edit]
If point R is the inverse of point P then the lines perpendicular to the line PR through one of the points is the polar of the other point (the pole).
Poles and polars have several useful properties:
- If a point P lies on a line l, then the pole L of the line l lies on the polar p of point P.
- If a point P moves along a line l, its polar p rotates about the pole L of the line l.
- If two tangent lines can be drawn from a pole to the circle, then its polar passes through both tangent points.
- If a point lies on the circle, its polar is the tangent through this point.
- If a point P lies on its own polar line, then P is on the circle.
- Each line has exactly one pole.
In three dimensions
[edit]


Circle inversion is generalizable to sphere inversion in three dimensions. The inversion of a point P in 3D with respect to a reference sphere centered at a point O with radius R is a point P ' on the ray with direction OP such that . As with the 2D version, a sphere inverts to a sphere, except that if a sphere passes through the center O of the reference sphere, then it inverts to a plane. Any plane passing through O, inverts to a sphere touching at O. A circle, that is, the intersection of a sphere with a secant plane, inverts into a circle, except that if the circle passes through O it inverts into a line. This reduces to the 2D case when the secant plane passes through O, but is a true 3D phenomenon if the secant plane does not pass through O.

Examples in three dimensions
[edit]Sphere
[edit]The simplest surface (besides a plane) is the sphere. The first picture shows a non trivial inversion (the center of the sphere is not the center of inversion) of a sphere together with two orthogonal intersecting pencils of circles.
Cylinder, cone, torus
[edit]The inversion of a cylinder, cone, or torus results in a Dupin cyclide.
Spheroid
[edit]A spheroid is a surface of revolution and contains a pencil of circles which is mapped onto a pencil of circles (see picture). The inverse image of a spheroid is a surface of degree 4.
Hyperboloid of one sheet
[edit]A hyperboloid of one sheet, which is a surface of revolution contains a pencil of circles which is mapped onto a pencil of circles. A hyperboloid of one sheet contains additional two pencils of lines, which are mapped onto pencils of circles. The picture shows one such line (blue) and its inversion.
Stereographic projection as the inversion of a sphere
[edit]
A stereographic projection usually projects a sphere from a point (north pole) of the sphere onto the tangent plane at the opposite point (south pole). This mapping can be performed by an inversion of the sphere onto its tangent plane. If the sphere (to be projected) has the equation (alternately written ; center , radius , green in the picture), then it will be mapped by the inversion at the unit sphere (red) onto the tangent plane at point . The lines through the center of inversion (point ) are mapped onto themselves. They are the projection lines of the stereographic projection.







6-sphere coordinates
[edit]The 6-sphere coordinates are a coordinate system for three-dimensional space obtained by inverting the Cartesian coordinates.
Axiomatics and generalization
[edit]One of the first to consider foundations of inversive geometry was Mario Pieri in 1911 and 1912.[7] Edward Kasner wrote his thesis on "Invariant theory of the inversion group".[8]
More recently the mathematical structure of inversive geometry has been interpreted as an incidence structure where the generalized circles are called "blocks": In incidence geometry, any affine plane together with a single point at infinity forms a Möbius plane, also known as an inversive plane. The point at infinity is added to all the lines. These Möbius planes can be described axiomatically and exist in both finite and infinite versions.
A model for the Möbius plane that comes from the Euclidean plane is the Riemann sphere.
Invariant
[edit]The cross-ratio between 4 points is invariant under an inversion. In particular if O is the centre of the inversion and and are distances to the ends of a line L, then length of the line will become under an inversion with radius 1. The invariant is:






Relation to Erlangen program
[edit]According to Coxeter,[9] the transformation by inversion in circle was invented by L. I. Magnus in 1831. Since then this mapping has become an avenue to higher mathematics. Through some steps of application of the circle inversion map, a student of transformation geometry soon appreciates the significance of Felix Klein's Erlangen program, an outgrowth of certain models of hyperbolic geometry.
Dilation
[edit]The combination of two inversions in concentric circles results in a similarity, homothetic transformation, or dilation characterized by the ratio of the circle radii.

Reciprocation
[edit]When a point in the plane is interpreted as a complex number with complex conjugate then the reciprocal of z is



Consequently, the algebraic form of the inversion in a unit circle is given by where:

- .

Reciprocation is key in transformation theory as a generator of the Möbius group. The other generators are translation and rotation, both familiar through physical manipulations in the ambient 3-space. Introduction of reciprocation (dependent upon circle inversion) is what produces the peculiar nature of Möbius geometry, which is sometimes identified with inversive geometry (of the Euclidean plane). However, inversive geometry is the larger study since it includes the raw inversion in a circle (not yet made, with conjugation, into reciprocation). Inversive geometry also includes the conjugation mapping. Neither conjugation nor inversion-in-a-circle are in the Möbius group since they are non-conformal (see below). Möbius group elements are analytic functions of the whole plane and so are necessarily conformal.
Transforming circles into circles
[edit]Consider, in the complex plane, the circle of radius around the point



where without loss of generality, Using the definition of inversion


it is straightforward to show that obeys the equation


and hence that describes the circle of center and radius


When the circle transforms into the line parallel to the imaginary axis


For and the result for is


![{\displaystyle {\begin{aligned}&ww^{*}-{\frac {aw+a^{*}w^{*}}{(a^{*}a-r^{2})}}+{\frac {aa^{*}}{(aa^{*}-r^{2})^{2}}}={\frac {r^{2}}{(aa^{*}-r^{2})^{2}}}\\[4pt]\Longleftrightarrow {}&\left(w-{\frac {a^{*}}{aa^{*}-r^{2}}}\right)\left(w^{*}-{\frac {a}{a^{*}a-r^{2}}}\right)=\left({\frac {r}{\left|aa^{*}-r^{2}\right|}}\right)^{2}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9aa6efc01b1fd1b842804099c2595fcb27ea2ee0)
showing that the describes the circle of center and radius .


When the equation for becomes

![{\displaystyle {\begin{aligned}&aw+a^{*}w^{*}=1\Longleftrightarrow 2\operatorname {Re} \{aw\}=1\Longleftrightarrow \operatorname {Re} \{a\}\operatorname {Re} \{w\}-\operatorname {Im} \{a\}\operatorname {Im} \{w\}={\frac {1}{2}}\\[4pt]\Longleftrightarrow {}&\operatorname {Im} \{w\}={\frac {\operatorname {Re} \{a\}}{\operatorname {Im} \{a\}}}\cdot \operatorname {Re} \{w\}-{\frac {1}{2\cdot \operatorname {Im} \{a\}}}.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2b252d9984bc3b1ce123df34bd78d93f6c3accef)
Higher geometry
[edit]As mentioned above, zero, the origin, requires special consideration in the circle inversion mapping. The approach is to adjoin a point at infinity designated ∞ or 1/0 . In the complex number approach, where reciprocation is the apparent operation, this procedure leads to the complex projective line, often called the Riemann sphere. It was subspaces and subgroups of this space and group of mappings that were applied to produce early models of hyperbolic geometry by Beltrami, Cayley, and Klein. Thus inversive geometry includes the ideas originated by Lobachevsky and Bolyai in their plane geometry. Furthermore, Felix Klein was so overcome by this facility of mappings to identify geometrical phenomena that he delivered a manifesto, the Erlangen program, in 1872. Since then many mathematicians reserve the term geometry for a space together with a group of mappings of that space. The significant properties of figures in the geometry are those that are invariant under this group.
For example, Smogorzhevsky[10] develops several theorems of inversive geometry before beginning Lobachevskian geometry.
In higher dimensions
[edit]In a real n-dimensional Euclidean space, an inversion in the sphere of radius r centered at the point is a map of an arbitrary point found by inverting the length of the displacement vector and multiplying by :




![{\displaystyle {\begin{aligned}P&\mapsto P'=O+{\frac {r^{2}(P-O)}{\|P-O\|^{2}}},\\[5mu]p_{j}&\mapsto p_{j}'=o_{j}+{\frac {r^{2}(p_{j}-o_{j})}{\sum _{k}(p_{k}-o_{k})^{2}}}.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a8d3570ef2a3e7bb3c4daedbf92471160fff616d)
The transformation by inversion in hyperplanes or hyperspheres in En can be used to generate dilations, translations, or rotations. Indeed, two concentric hyperspheres, used to produce successive inversions, result in a dilation or homothety about the hyperspheres' center.
When two parallel hyperplanes are used to produce successive reflections, the result is a translation. When two hyperplanes intersect in an (n−2)-flat, successive reflections produce a rotation where every point of the (n−2)-flat is a fixed point of each reflection and thus of the composition.
Any combination of reflections, translations, and rotations is called an isometry. Any combination of reflections, dilations, translations, and rotations is a similarity.
All of these are conformal maps, and in fact, where the space has three or more dimensions, the mappings generated by inversion are the only conformal mappings. Liouville's theorem is a classical theorem of conformal geometry.
The addition of a point at infinity to the space obviates the distinction between hyperplane and hypersphere; higher dimensional inversive geometry is frequently studied then in the presumed context of an n-sphere as the base space. The transformations of inversive geometry are often referred to as Möbius transformations. Inversive geometry has been applied to the study of colorings, or partitionings, of an n-sphere.[11]
Anticonformal mapping property
[edit]The circle inversion map is anticonformal, which means that at every point it preserves angles and reverses orientation (a map is called conformal if it preserves oriented angles). Algebraically, a map is anticonformal if at every point the Jacobian is a scalar times an orthogonal matrix with negative determinant: in two dimensions the Jacobian must be a scalar times a reflection at every point. This means that if J is the Jacobian, then and Computing the Jacobian in the case zi = xi/‖x‖2, where ‖x‖2 = x12 + ... + xn2 gives JJT = kI, with k = 1/‖x‖4n, and additionally det(J) is negative; hence the inversive map is anticonformal.


In the complex plane, the most obvious circle inversion map (i.e., using the unit circle centered at the origin) is the complex conjugate of the complex inverse map taking z to 1/z. The complex analytic inverse map is conformal and its conjugate, circle inversion, is anticonformal. In this case a homography is conformal while an anti-homography is anticonformal.
Hyperbolic geometry
[edit]The (n − 1)-sphere with equation

will have a positive radius if a12 + ... + an2 is greater than c, and on inversion gives the sphere

Hence, it will be invariant under inversion if and only if c = 1. But this is the condition of being orthogonal to the unit sphere. Hence we are led to consider the (n − 1)-spheres with equation

{kind=link}
which are invariant under inversion, orthogonal to the unit sphere, and have centers outside of the sphere. These together with the subspace hyperplanes separating hemispheres are the hypersurfaces of the Poincaré disk model of hyperbolic geometry.
Since inversion in the unit sphere leaves the spheres orthogonal to it invariant, the inversion maps the points inside the unit sphere to the outside and vice versa. This is therefore true in general of orthogonal spheres, and in particular inversion in one of the spheres orthogonal to the unit sphere maps the unit sphere to itself. It also maps the interior of the unit sphere to itself, with points outside the orthogonal sphere mapping inside, and vice versa; this defines the reflections of the Poincaré disc model if we also include with them the reflections through the diameters separating hemispheres of the unit sphere. These reflections generate the group of isometries of the model, which tells us that the isometries are conformal. Hence, the angle between two curves in the model is the same as the angle between two curves in the hyperbolic space.
See also
[edit]Notes
[edit]- ^ Curves and Their Properties by Robert C. Yates, National Council of Teachers of Mathematics, Inc., Washington, D.C., p. 127: "Geometrical inversion seems to be due to Jakob Steiner who indicated a knowledge of the subject in 1824. He was closely followed by Adolphe Quetelet (1825) who gave some examples. Apparently independently discovered by Giusto Bellavitis in 1836, by Stubbs and Ingram in 1842–3, and by Lord Kelvin in 1845.)"
- ^ Altshiller-Court (1952, p. 230)
- ^ Kay (1969, p. 264)
- ^ a b Dutta, Surajit (2014) A simple property of isosceles triangles with applications Archived 2018-04-21 at the Wayback Machine, Forum Geometricorum 14: 237–240
- ^ a b Kay (1969, p. 265)
- ^ Kay (1969, p. 269)
- ^ M. Pieri (1911,12) "Nuovi principia di geometria della inversion", Giornal di Matematiche di Battaglini 49:49–96 & 50:106–140
- ^ Kasner, E. (1900). "The Invariant Theory of the Inversion Group: Geometry Upon a Quadric Surface". Transactions of the American Mathematical Society. 1 (4): 430–498. doi:10.1090/S0002-9947-1900-1500550-1. hdl:2027/miun.abv0510.0001.001. JSTOR 1986367.
- ^ Coxeter 1969, pp. 77–95
- ^ A.S. Smogorzhevsky (1982) Lobachevskian Geometry, Mir Publishers, Moscow
- ^ Joel C. Gibbons & Yushen Luo (2013) Colorings of the n-sphere and inversive geometry
References
[edit]- Altshiller-Court, Nathan (1952), College Geometry: An Introduction to the Modern Geometry of the Triangle and the Circle (2nd ed.), New York: Barnes & Noble, LCCN 52-13504
- Blair, David E. (2000), Inversion Theory and Conformal Mapping, American Mathematical Society, ISBN 0-8218-2636-0
- Brannan, David A.; Esplen, Matthew F.; Gray, Jeremy J. (1998), "Chapter 5: Inversive Geometry", Geometry, Cambridge: Cambridge University Press, pp. 199–260, ISBN 0-521-59787-0
- Coxeter, H.S.M. (1969) [1961], Introduction to Geometry (2nd ed.), John Wiley & Sons, ISBN 0-471-18283-4
- Hartshorne, Robin (2000), "Chapter 7: Non-Euclidean Geometry, Section 37: Circular Inversion", Geometry: Euclid and Beyond, Springer, ISBN 0-387-98650-2
- Kay, David C. (1969), College Geometry, New York: Holt, Rinehart and Winston, LCCN 69-12075
- Patterson, Boyd (1941) "The Inversive Plane", American Mathematical Monthly 48: 589–99, doi:10.2307/2303867 MR 0006034
External links
[edit]- Inversion: Reflection in a Circle at cut-the-knot
- Wilson Stother's inversive geometry page
- IMO Compendium Training Materials practice problems on how to use inversion for math olympiad problems
- Weisstein, Eric W. "Inversion". MathWorld.
- Visual Dictionary of Special Plane Curves Xah Lee
Inversive geometry
View on GrokipediaCore Concepts
Definition of Circle Inversion
Circle inversion is a geometric transformation defined in the Euclidean plane with respect to a given circle, serving as the foundational operation in inversive geometry. Consider a circle centered at a point with radius . For any point in the plane distinct from , the inverse point is the unique point lying on the ray starting at and passing through such that the product of the distances .[9] This relation ensures that points inside the circle map outside and vice versa, with points on the circle remaining fixed. The transformation establishes a bijection between the Euclidean plane excluding the center (often called the pole of inversion) and itself, as the mapping is invertible: applying the inversion twice returns the original point.[9] This one-to-one correspondence preserves the structure of the plane minus the pole, providing a powerful tool for studying geometric configurations by relating distant points through the circle's reference. The concept of circle inversion was introduced by the Swiss mathematician Jakob Steiner in his 1826 paper "Einige geometrische Betrachtungen," where it was employed as a method for synthetic geometric constructions, particularly involving the power of a point and circle similitudes.[10]Geometric Construction of Inversion
The geometric construction of the inverse point of a point with respect to a circle centered at with radius can be performed using a compass and straightedge, relying on the power of a point and properties of right triangles.[11] This method exploits the fact that the inverse point lies on the ray from through such that , and it is particularly straightforward for points outside the circle. For outside the circle, the construction proceeds as follows:- Draw the line segment .
- Construct the perpendicular bisector of to locate the midpoint .
- With center and radius , draw a circle; this circle has diameter and intersects the original circle at two points and (symmetric across ).
- Select one intersection point, say .
- Construct the perpendicular from to the line ; the foot of this perpendicular is the inverse point .
- Draw the ray .
- Locate point on such that .
- Construct the perpendicular bisector of to find its intersection with the original circle.
- Draw the ray .
- Locate point on such that .
- Construct the perpendicular bisector of ; its intersection with is .
- Draw the ray from through , intersecting at .
- Construct a circle centered at with radius .
- Construct a circle centered at with radius ; let be one intersection point of these two circles (other than ).
- Draw the line , which intersects the ray from through at .
Fundamental Properties of Inversion
Inversion with respect to a circle of radius centered at the origin in the plane is defined such that for a point at distance from the center, its inverse lies on the same ray from the origin and satisfies .[13] This leads to the coordinate equations and , derived by scaling the position vector of by the factor .[13] These equations highlight the non-linear nature of inversion, as distances from the center are scaled inversely proportional to the square of the original distance, contrasting sharply with linear transformations like similarities or isometries that preserve ratios uniformly.[13] A key property of inversion is its conformality: it preserves angles between intersecting curves, mapping them to curves that intersect at the same angle, though it reverses the orientation of figures.[13] This local preservation of shape makes inversion useful for studying geometric configurations, as infinitesimal angles remain unchanged in magnitude.[13] The transformation integrates naturally with the power of a point theorem, where the power of with respect to the inverting circle—defined as —relates directly to the inversion process, since the product implies that the power of the inverse point is the negative of the power of scaled by .[13] Regarding fixed points, inversion maps the center of the circle to infinity and vice versa, leaving no finite fixed point there, but every point on the inverting circle itself is fixed individually, as their distance from the center equals , satisfying with .[13] Thus, the circle is invariant as a set under the transformation.[13]Transformations in Inversive Geometry
Inversion as a Mapping
Inversion serves as a fundamental transformation in inversive geometry, mapping points in the Euclidean plane relative to a fixed circle, typically centered at the origin for simplicity. Consider a circle of radius centered at the origin . For a point with position vector and distance from , the inverse point lies on the ray from through such that . This geometric condition arises from the power of a point theorem or similar triangles in the construction, where the inversion preserves the product of distances along radial lines.[14][3] Algebraically, in Cartesian coordinates, the mapping transforms to viaCompositions and Group Structure
The inversive group, often denoted as the group of inversive transformations, is generated by the set of all circle inversions together with the Euclidean isometries of the plane, which include translations, rotations, and reflections.[17] This generation mirrors the way reflections generate the Euclidean group, but extends it to include non-isometric mappings that preserve angles up to sign.[18] The resulting group acts on the extended complex plane , treating lines as circles through infinity.[19] A key closure property is that the composition of two circle inversions yields a Möbius transformation, which is an orientation-preserving mapping of the form with .[18] Conversely, every Möbius transformation can be expressed as a composition of at most four inversions, highlighting the foundational role of inversions in generating the group.[17] In the complex plane, a single circle inversion with center at the origin and radius corresponds to the anti-Möbius map , where denotes the complex conjugate; more generally, inversions in arbitrary circles take this anti-conformal form after conjugation by a Möbius transformation.[20] The full inversive group thus consists of all Möbius transformations and their anti-Möbius counterparts (involving conjugation), forming a structure isomorphic to the orthogonal group O(3,1) acting on the Riemann sphere.[19] Inversions are inherently orientation-reversing, as they reverse the direction of angles, leading the full inversive group to include both conformal (orientation-preserving) and anti-conformal (orientation-reversing) maps.[18] This dual nature arises because composing an even number of inversions preserves orientation (yielding Möbius transformations), while an odd number reverses it.[17] The group acts transitively on the set of all circles (including lines as circles through infinity), meaning any circle can be mapped to any other via an element of the group, which underscores its utility in studying circle packings and orthogonal configurations.[13]Anticonformal Nature
In inversive geometry, circle inversion exhibits an anticonformal nature, preserving the magnitude of angles between intersecting curves while reversing their orientation, or handedness. This means that if two curves intersect at an angle , their images under inversion intersect at the same angle , but the clockwise or counterclockwise sense is flipped. Such transformations are sense-reversing conformal maps, where the Jacobian determinant is negative at every point.[21][22] The local behavior of inversion involves a similarity factor that scales lengths by , where k is the radius of the inversion circle and r is the distance from the inversion center to the point of interest. This factor indicates that infinitesimally small shapes are mapped to similar shapes, up to the orientation reversal and the position-dependent scaling. For areas, the scaling is , reflecting the conformal preservation of shape up to reflection.[23] The orientation reversal is evident in the Jacobian determinant derived from the coordinate transformation. For an inversion in the unit circle centered at the origin, the mapping is given by . The Jacobian matrix has partial derivatives leading to a determinant of , where the negative sign confirms the reversal. In general, for radius k, the determinant is , obtained by scaling the unit case. This negative value distinguishes inversion from orientation-preserving transformations.[21] In contrast to direct conformal maps like rotations, translations, and dilations—which have positive Jacobian determinants and preserve orientation—inversions are inherently orientation-reversing. While direct maps form the special conformal group, inversions generate anti-conformal elements, and compositions involving an odd number of inversions remain orientation-reversing.[21] The anticonformal property of inversions proves valuable in geometric constructions and proofs, enabling the establishment of equivalence between figures up to reflection. For example, in the classical Apollonius problem of constructing a circle tangent to three given circles, inversion can reduce the configuration to a simpler case involving reflection across a line, facilitating the solution via straightedge and compass methods.[24]Geometric Objects and Examples
Behavior of Circles and Lines
In inversive geometry, circle inversion preserves the family of generalized circles, which encompass both ordinary circles and straight lines (the latter treated as circles of infinite radius). The key theorem states that any inversion maps a generalized circle to another generalized circle. This property arises because the inversion transformation, defined with respect to a circle of radius $ r $ centered at point $ O $, sends points $ P $ to their inverses $ P' $ such that $ OP \cdot OP' = r^2 $, and the image of a set of points lying on a generalized circle satisfies the equation of another such curve.[1][14] A proof outline relies on the power of a point theorem and geometric properties like the inscribed angle theorem (angle in a semicircle is $ 90^\circ $). Consider a generalized circle $ \gamma $ and the inversion center $ O $. The power of $ O $ with respect to $ \gamma $ determines the mapping: if $ \gamma $ intersects the inverting circle orthogonally, the power is $ r^2 $, preserving the curve. For lines through $ O $, the ray structure ensures the image coincides with the original line, as each point and its inverse lie on the same ray. Lines not through $ O $ map to circles passing through $ O $, demonstrated by constructing similar triangles or using the fact that the inverse points form a curve where angles subtended by diameters are right angles, yielding a circular arc. Similarly, circles not through $ O $ invert to circles not through $ O $, via a homothety centered at $ O $ with ratio related to the power.[3][1] Special cases highlight the theorem's utility. Circles passing through the inversion center $ O $ map to straight lines not containing $ O $, as the inverse points lie on a line parallel to the tangent at $ O $ or determined by limiting behavior. Conversely, straight lines not through $ O $ map to circles through $ O $. Circles orthogonal to the inverting circle are invariant as sets under inversion, meaning their images coincide with themselves, though points are permuted along the curve; this follows from the orthogonality condition ensuring the power equals $ r^2 $, preserving intersection angles of $ 90^\circ $. Lines through $ O $ are also invariant.[14][4] The pole and polar relation provides another perspective on these transformations with respect to the inverting circle $ \Gamma(O, r) $. For any point $ P \neq O $, the polar of $ P $ is the line perpendicular to the ray $ OP $ passing through the inverse point $ P' $, satisfying $ OP \cdot OP' = r^2 $. This line is the locus of points harmonic to $ P $ with respect to intersection points on secants from $ P $. Inversion interchanges poles and polars in the sense that applying the transformation maps a point to a location on its own polar and transforms polar lines into curves whose poles relate symmetrically, embodying the duality inherent in the geometry. If $ P $ lies on the polar of a point $ Q $, then $ Q $ lies on the polar of $ P $, and inversion preserves such incidences.[25][14]Applications in Two Dimensions
Inversive geometry provides powerful tools for solving classical problems in the Euclidean plane, particularly those involving circles and tangency conditions. One prominent application is the solution to the Apollonius problem of constructing circles tangent to three given circles. By performing an inversion with respect to a suitable circle, the problem can be transformed into a simpler configuration, such as finding lines tangent to three transformed circles or concentric circles tangent to adjusted ones, reducing the quadratic equations to linear constructions. For instance, in the case of three mutually tangent circles, inversion simplifies the search for the inner or outer Soddy circles by mapping the tangency conditions to parallel tangents or concentric setups. This method yields up to eight solutions, depending on the combinations of internal and external tangencies.[26][13] Inversion also simplifies the study of orthogonal circles and radical axes. Circles that intersect orthogonally—meaning at right angles—are mapped to other orthogonal circles under inversion, preserving their intersection angles and facilitating proofs of tangency or power properties. The radical axis of two circles, defined as the locus of points with equal power relative to both, transforms under inversion into the radical axis of the images, often straightening complex intersections into lines perpendicular to the line of centers. This is particularly useful for analyzing families of circles, where inversion can convert intersecting orthogonal pairs into concentric circles, easing computations of common tangents or mid-circles.[13][1] Concrete examples illustrate these transformations vividly. Inverting a limaçon with respect to a circle centered at its node produces a cardioid, revealing shared properties with conic sections such as envelopes or pedal curves, derived from the inversion of an ellipse or hyperbola. Similarly, a system of coaxial circles—those sharing a common radical axis and intersecting at two fixed points—can be inverted, with the center at one intersection point, to yield a pencil of parallel lines, simplifying the analysis of their envelope or orthogonal trajectories.[27][13] The construction of inverse curves exemplifies these principles, especially for lines. Consider a straight line not passing through the inversion center . Its inverse is a circle passing through , with the original line serving as the radical axis of this circle and the inversion circle. To construct it explicitly, select two points and on the line; their inverses and lie on the resulting circle, which can be drawn by finding the circle through , , and . This circle's diameter is perpendicular to the original line at the foot of the perpendicular from , highlighting how inversion interchanges lines and circles while preserving angles and incidence.[13]Applications in Three Dimensions
In three-dimensional space, sphere inversion is defined analogously to circle inversion in the plane, mapping a point $ \mathbf{P} $ to its inverse $ \mathbf{P}' $ with respect to a sphere of center $ \mathbf{O} $ and radius $ k $, such that $ \mathbf{P} $ and $ \mathbf{P}' $ lie on the same ray from $ \mathbf{O} $ and $ OP \cdot OP' = k^2 $.[14][28] For a sphere centered at the origin with radius $ r $, the transformation of a point $ \mathbf{x} $ is given by $ \mathbf{x}' = \frac{r^2}{|\mathbf{x}|^2} \mathbf{x} $.[28] This mapping is conformal, preserving angles up to orientation reversal, and extends the properties of planar inversive geometry to volumes.[14] Under sphere inversion, spheres and planes map to spheres or planes, treating planes as spheres of infinite radius.[14] Specifically, a sphere not passing through the inversion center maps to another sphere, while one passing through the center maps to a plane; conversely, planes not through the center map to spheres, and those through the center map to themselves.[14] This property simplifies the study of configurations involving multiple spheres, as inversion preserves incidence and tangency relations.[14] Common geometric objects transform into more complex surfaces under sphere inversion. A right circular cylinder inverts to a Dupin cyclide, a quartic surface characterized by lines of curvature that are circles.[29] Similarly, a right circular cone inverts to a Dupin cyclide, often a double horn cyclide where circles intersect at the vertex and origin.[29][30] A torus inverts to a Dupin cyclide, such as a ring cyclide or a self-intersecting spindle cyclide depending on the inversion sphere's position relative to the torus.[31] These transformations highlight how inversion generates families of algebraic surfaces from simpler quadrics, with Dupin cyclides notable for their applications in modeling canal surfaces and conformal parametrizations.[29] Sphere inversion finds practical use in simplifying three-dimensional intersection and tangency problems. For instance, constructing spheres tangent to two given spheres and a plane—where the given elements are mutually tangent—becomes tractable by inverting with respect to a sphere centered at a common tangency point.[32] This inversion maps the given spheres to parallel planes and the plane to a sphere, reducing the problem to finding tangent spheres in the inverted space, whose images yield solutions in the original configuration while preserving tangency.[32] Such techniques extend classical problems like the Apollonius problem to 3D, aiding in geometric constructions and dynamic geometry software implementations.[32]Extensions and Generalizations
Inversion in Higher Dimensions
In n-dimensional Euclidean space , inversion is generalized as a transformation with respect to an -dimensional hypersphere of radius centered at the origin. For a point , the inverse point is given by the formulaAxiomatic Foundations
Inversive geometry can be axiomatized as an abstract structure independent of Euclidean coordinates, with points and circles serving as primitive notions alongside an incidence relation between them. The foundational work in this direction was undertaken by Mario Pieri, who in 1911 presented a system of axioms emphasizing harmonic properties and deriving inversions as transformations that preserve circles and reverse angles. Pieri's approach, detailed in his paper "Nuovi principii di geometria delle inversioni," posits inversion as a primitive operation that maps points to points while maintaining the incidence of circles, thereby establishing inversive geometry as a hypothetical-deductive system akin to projective geometry.[36] Building on the synthetic tradition initiated by Karl von Staudt's 1847 treatise Geometrie der Lage, which axiomatized projective geometry through incidence and collinearity without metric assumptions, inversive geometry adapts these ideas by replacing lines with circles. Von Staudt's contributions provided the methodological framework for metric-free geometries, influencing later axiomatizations that treat inversions as the core collineation-like mappings in a circular context. Modern formulations, such as those by H. L. Dorwart and others, refine this by specifying axioms for points, circles, and their intersections.[37] A standard set of basic axioms for inversive plane geometry includes the following:- Incidence Axiom I1: For any three distinct points, there exists a unique circle incident with all three.
- Intersection Axiom I2: Given distinct points and , and a circle through but not , there exists a unique circle through intersecting only at .
- Non-degeneracy Axiom I3: There exist four points no three of which are incident with a common circle.