
Community hub
Recent from talks
Contribute something
Nothing was collected or created yet.
Ground-effect train
View on Wikipedia
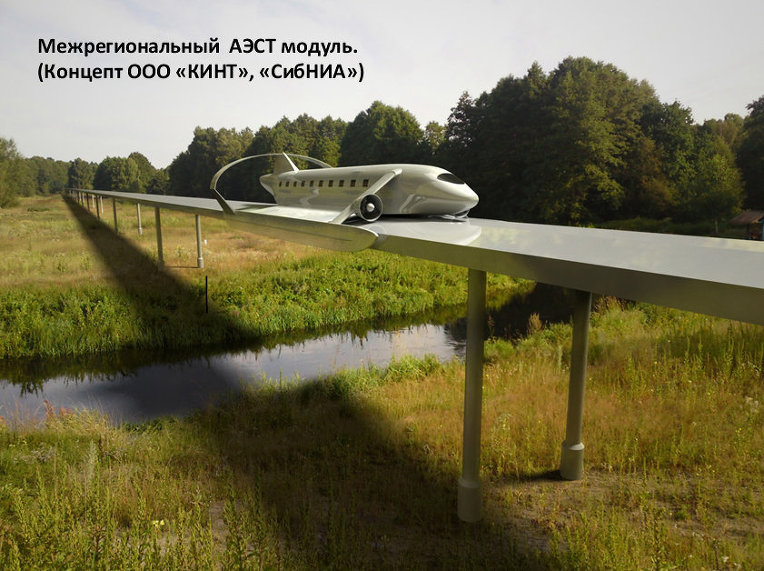
A ground-effect train is a conceptualized alternative to a magnetic levitation (maglev) train. In both cases the objective is to prevent the vehicle from making contact with the ground. Whereas a maglev train accomplishes this through the use of magnetism, a ground-effect train uses an air cushion; either in the manner of a hovercraft (as in hovertrains) or using the wing–in–ground-effect design.
Details
[edit]The advantages of a ground-effect train over a maglev are lower cost due to simpler construction. Disadvantages include either constant input of energy to keep the train hovering (in the case of hovercraft-like vehicles) or the necessity to keep the vehicle moving for it to remain off the ground (in the case of wing–in–ground-effect vehicles). Furthermore, these vehicles may be drastically affected by wind, air turbulence, and weather. Whereas the magnetic levitation train can be built to operate in a vacuum to minimise air resistance, the ground-effect train must operate in an atmosphere in order for the air cushion to exist.
Development work has been undertaken in several countries since the middle 20th century. No ground-effect train has entered regular commercial service.
Yusuke Sugahara and his team of researchers at Tohoku University, in Sendai, Japan have developed the Aero-Train that uses wings attached to a fuselage to fly inches off the ground. Dubbed a ground-effect vehicle the train is designed to be completely powered by wind and solar energy – making this a true zero-carbon transportation system.[1][2]
See also
[edit]References
[edit]- ^ "Full Page Reload". Archived from the original on 2018-12-05. Retrieved 2023-09-14.
- ^ "Japan Unveils Levitating High-Speed Electric Aero Train". Archived from the original on 2023-08-18. Retrieved 2023-09-14.
- Bastien, Stéphane, and Laframboise, M. Jacques (translation/adaptation) Aérotrain - The Aerotrain Story. Retrieved 7 January 2011.
- Joseph George Ground Effect Vehicle, Physics-edu (private) website. . Retrieved 7 January 2011.
- Kikuchi Satoshi (Inst. Of Fluid Sci., Tohoku Univ.), Watanabe Hideo (Inst. Of Fluid Sci., Tohoku Univ.), Ota Fukuo (Inst. Of Fluid Sci., Tohoku Univ.), Kawahara Susumu (Inst. Of Fluid Sci., Tohoku Univ.), Kohama Yasuaki (Inst. Of Fluid Sci., Tohoku Univ.). Dynamic Stability Control of Ground Effect Train, Nihon Kikai Gakkai Nenji Taikai Koen Ronbunshu, Japan, 2000, Vol.4, pp. 297–298, Journal Code:X0587B. (Japanese)
- Shonner website Rohr Industries Aérotrain - The Rohr Aerotrain Tracked Air-Cushion Vehicle (TACV), Shonner.com website. Retrieved 7 January 2011.
- Sleath, M. News In Science: Flying Trains, ABC Science website. Retrieved 7 January 2011.
External links
[edit]- Aero-Train – A Japanese prototype [dead link]
- Rohr Industries Aérotrain
- Aero-Train Video Archived 2011-07-16 at the Wayback Machine
- This Train Will Have Passengers Riding On Air Archived 2006-01-02 at the Wayback Machine