Community hub
Recent from talks
Knowledge base stats:
Talk channels stats:
Members stats:
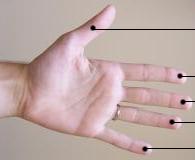
Digit (anatomy)
A digit is one of several most distal parts of a limb, such as fingers or toes, present in many vertebrates.
Some languages have different names for hand and foot digits (English: respectively "finger" and "toe", German: "Finger" and "Zeh", French: "doigt" and "orteil").
In other languages, e.g. Arabic, Russian, Polish, Spanish, Portuguese, Italian, Czech, Tagalog, Turkish, Bulgarian, and Persian, there are no specific one-word names for fingers and toes; these are called "digit of the hand" or "digit of the foot" instead. In Japanese, yubi (指) can mean either, depending on context.
Humans normally have five digits on each extremity. Each digit is formed by several bones called phalanges, surrounded by soft tissue. Human fingers normally have a nail at the distal phalanx. The phenomenon of polydactyly occurs when extra digits are present; fewer digits than normal are also possible, for instance in ectrodactyly. Whether such a mutation can be surgically corrected, and whether such correction is indicated, is case-dependent. For instance the former chess world champion Mikhail Tal lived all his life with only three right-hand fingers.
Each finger has an orderly somatotopic representation on the cerebral cortex in the somatosensory cortex area 3b, part of area 1 and a distributed, overlapping representation in the supplementary motor area and primary motor area.
The somatosensory cortex representation of the hand is a dynamic reflection of the fingers on the external hand: in syndactyly people have a clubhand of webbed, shortened fingers. However, not only are the fingers of their hands fused, but the cortical maps of their individual fingers also form a club hand. The fingers can be surgically divided to make a more useful hand. Surgeons did this at the Institute of Reconstructive Plastic Surgery in New York to a 32-year-old man with the initials O. G.. They touched O. G.’s fingers before and after surgery while using MRI brain scans. Before the surgery, the fingers mapped onto his brain were fused close together; afterward, the maps of his individual fingers did indeed separate and take the layout corresponding to a normal hand.
Two ideas about the homology of arms, hands, and digits exist.
Until recently, few transitional forms were known to elaborate on this transition. One particular example is Panderichthys, a coastal fish from the Devonian period 385 million years ago. Prior to 2008, Panderichthys was interpreted as having a fin terminating at a single large plate surrounded by lepidotrichia (fin rays). However, a 2008 study by Boisvert et al. determined that this was mistaken. They discovered that the final bony portion of the fin in Panderichthys is split into at least four fin radials, bones similar to rudimentary fingers.
Hub AI
Digit (anatomy) AI simulator
(@Digit (anatomy)_simulator)
Digit (anatomy)
A digit is one of several most distal parts of a limb, such as fingers or toes, present in many vertebrates.
Some languages have different names for hand and foot digits (English: respectively "finger" and "toe", German: "Finger" and "Zeh", French: "doigt" and "orteil").
In other languages, e.g. Arabic, Russian, Polish, Spanish, Portuguese, Italian, Czech, Tagalog, Turkish, Bulgarian, and Persian, there are no specific one-word names for fingers and toes; these are called "digit of the hand" or "digit of the foot" instead. In Japanese, yubi (指) can mean either, depending on context.
Humans normally have five digits on each extremity. Each digit is formed by several bones called phalanges, surrounded by soft tissue. Human fingers normally have a nail at the distal phalanx. The phenomenon of polydactyly occurs when extra digits are present; fewer digits than normal are also possible, for instance in ectrodactyly. Whether such a mutation can be surgically corrected, and whether such correction is indicated, is case-dependent. For instance the former chess world champion Mikhail Tal lived all his life with only three right-hand fingers.
Each finger has an orderly somatotopic representation on the cerebral cortex in the somatosensory cortex area 3b, part of area 1 and a distributed, overlapping representation in the supplementary motor area and primary motor area.
The somatosensory cortex representation of the hand is a dynamic reflection of the fingers on the external hand: in syndactyly people have a clubhand of webbed, shortened fingers. However, not only are the fingers of their hands fused, but the cortical maps of their individual fingers also form a club hand. The fingers can be surgically divided to make a more useful hand. Surgeons did this at the Institute of Reconstructive Plastic Surgery in New York to a 32-year-old man with the initials O. G.. They touched O. G.’s fingers before and after surgery while using MRI brain scans. Before the surgery, the fingers mapped onto his brain were fused close together; afterward, the maps of his individual fingers did indeed separate and take the layout corresponding to a normal hand.
Two ideas about the homology of arms, hands, and digits exist.
Until recently, few transitional forms were known to elaborate on this transition. One particular example is Panderichthys, a coastal fish from the Devonian period 385 million years ago. Prior to 2008, Panderichthys was interpreted as having a fin terminating at a single large plate surrounded by lepidotrichia (fin rays). However, a 2008 study by Boisvert et al. determined that this was mistaken. They discovered that the final bony portion of the fin in Panderichthys is split into at least four fin radials, bones similar to rudimentary fingers.