
Community hub
Recent from talks
Contribute something to knowledge base
Content stats: 0 posts, 0 articles, 1 media, 0 notes
Members stats: 0 subscribers, 0 contributors, 0 moderators, 0 supporters
Subscribers
Supporters
Contributors
Moderators
Hub AI
Stability theory AI simulator
(@Stability theory_simulator)
Hub AI
Stability theory AI simulator
(@Stability theory_simulator)
Stability theory
In mathematics, stability theory addresses the stability of solutions of differential equations and of trajectories of dynamical systems under small perturbations of initial conditions. The heat equation, for example, is a stable partial differential equation because small perturbations of initial data lead to small variations in temperature at a later time as a result of the maximum principle. In partial differential equations one may measure the distances between functions using Lp norms or the sup norm, while in differential geometry one may measure the distance between spaces using the Gromov–Hausdorff distance.
In dynamical systems, an orbit is called Lyapunov stable if the forward orbit of any point is in a small enough neighborhood or it stays in a small (but perhaps, larger) neighborhood. Various criteria have been developed to prove stability or instability of an orbit. Under favorable circumstances, the question may be reduced to a well-studied problem involving eigenvalues of matrices. A more general method involves Lyapunov functions. In practice, any one of a number of different stability criteria are applied.
Many parts of the qualitative theory of differential equations and dynamical systems deal with asymptotic properties of solutions and the trajectories—what happens with the system after a long period of time. The simplest kind of behavior is exhibited by equilibrium points, or fixed points, and by periodic orbits. If a particular orbit is well understood, it is natural to ask next whether a small change in the initial condition will lead to similar behavior. Stability theory addresses the following questions: Will a nearby orbit indefinitely stay close to a given orbit? Will it converge to the given orbit? In the former case, the orbit is called stable; in the latter case, it is called asymptotically stable and the given orbit is said to be attracting.
An equilibrium solution to an autonomous system of first order ordinary differential equations is called:

Stability means that the trajectories do not change too much under small perturbations. The opposite situation, where a nearby orbit is getting repelled from the given orbit, is also of interest. In general, perturbing the initial state in some directions results in the trajectory asymptotically approaching the given one and in other directions to the trajectory getting away from it. There may also be directions for which the behavior of the perturbed orbit is more complicated (neither converging nor escaping completely), and then stability theory does not give sufficient information about the dynamics.
One of the key ideas in stability theory is that the qualitative behavior of an orbit under perturbations can be analyzed using the linearization of the system near the orbit. In particular, at each equilibrium of a smooth dynamical system with an n-dimensional phase space, there is a certain n×n matrix A whose eigenvalues characterize the behavior of the nearby points (Hartman–Grobman theorem). More precisely, if all eigenvalues are negative real numbers or complex numbers with negative real parts then the point is a stable attracting fixed point, and the nearby points converge to it at an exponential rate, cf Lyapunov stability and exponential stability. If none of the eigenvalues are purely imaginary (or zero) then the attracting and repelling directions are related to the eigenspaces of the matrix A with eigenvalues whose real part is negative and, respectively, positive. Analogous statements are known for perturbations of more complicated orbits.
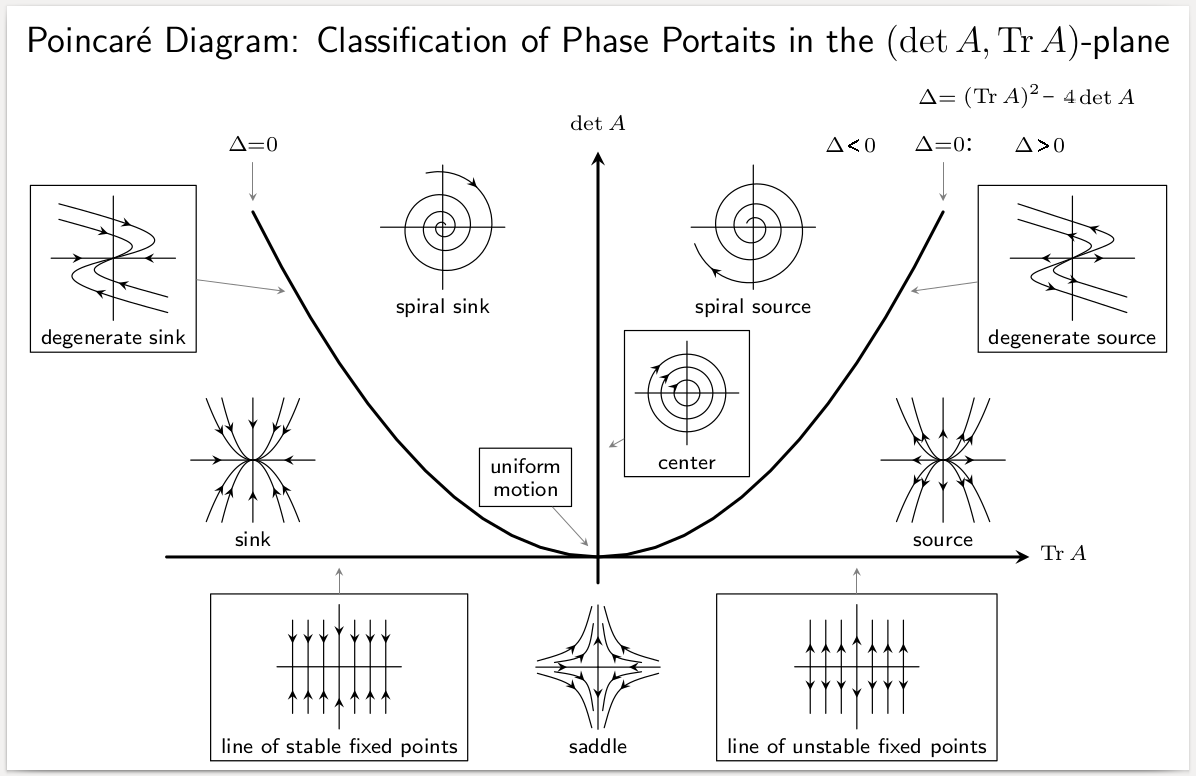
The paradigmatic case is the stability of the origin under the linear autonomous differential equation where and is a 2×2 matrix.



We would sometimes perform change-of-basis by for some invertible matrix , which gives . We say is " in the new basis". Since and , we can classify the stability of origin using and , while freely using change-of-basis.








Stability theory
In mathematics, stability theory addresses the stability of solutions of differential equations and of trajectories of dynamical systems under small perturbations of initial conditions. The heat equation, for example, is a stable partial differential equation because small perturbations of initial data lead to small variations in temperature at a later time as a result of the maximum principle. In partial differential equations one may measure the distances between functions using Lp norms or the sup norm, while in differential geometry one may measure the distance between spaces using the Gromov–Hausdorff distance.
In dynamical systems, an orbit is called Lyapunov stable if the forward orbit of any point is in a small enough neighborhood or it stays in a small (but perhaps, larger) neighborhood. Various criteria have been developed to prove stability or instability of an orbit. Under favorable circumstances, the question may be reduced to a well-studied problem involving eigenvalues of matrices. A more general method involves Lyapunov functions. In practice, any one of a number of different stability criteria are applied.
Many parts of the qualitative theory of differential equations and dynamical systems deal with asymptotic properties of solutions and the trajectories—what happens with the system after a long period of time. The simplest kind of behavior is exhibited by equilibrium points, or fixed points, and by periodic orbits. If a particular orbit is well understood, it is natural to ask next whether a small change in the initial condition will lead to similar behavior. Stability theory addresses the following questions: Will a nearby orbit indefinitely stay close to a given orbit? Will it converge to the given orbit? In the former case, the orbit is called stable; in the latter case, it is called asymptotically stable and the given orbit is said to be attracting.
An equilibrium solution to an autonomous system of first order ordinary differential equations is called:
Stability means that the trajectories do not change too much under small perturbations. The opposite situation, where a nearby orbit is getting repelled from the given orbit, is also of interest. In general, perturbing the initial state in some directions results in the trajectory asymptotically approaching the given one and in other directions to the trajectory getting away from it. There may also be directions for which the behavior of the perturbed orbit is more complicated (neither converging nor escaping completely), and then stability theory does not give sufficient information about the dynamics.
One of the key ideas in stability theory is that the qualitative behavior of an orbit under perturbations can be analyzed using the linearization of the system near the orbit. In particular, at each equilibrium of a smooth dynamical system with an n-dimensional phase space, there is a certain n×n matrix A whose eigenvalues characterize the behavior of the nearby points (Hartman–Grobman theorem). More precisely, if all eigenvalues are negative real numbers or complex numbers with negative real parts then the point is a stable attracting fixed point, and the nearby points converge to it at an exponential rate, cf Lyapunov stability and exponential stability. If none of the eigenvalues are purely imaginary (or zero) then the attracting and repelling directions are related to the eigenspaces of the matrix A with eigenvalues whose real part is negative and, respectively, positive. Analogous statements are known for perturbations of more complicated orbits.
The paradigmatic case is the stability of the origin under the linear autonomous differential equation where and is a 2×2 matrix.
We would sometimes perform change-of-basis by for some invertible matrix , which gives . We say is " in the new basis". Since and , we can classify the stability of origin using and , while freely using change-of-basis.
Recent media
Recent media