Recent from talks
Treemapping
Knowledge base stats:
Talk channels stats:
Members stats:
Treemapping
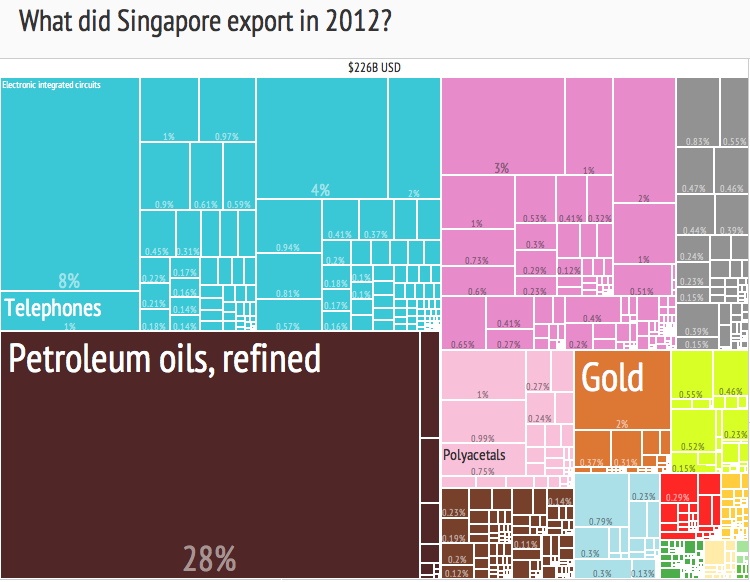
In information visualization and computing, treemapping is a method for displaying hierarchical data using nested figures, usually rectangles.
Treemaps display hierarchical (tree-structured) data as a set of nested rectangles. Each branch of the tree is given a rectangle, which is then tiled with smaller rectangles representing sub-branches. A leaf node's rectangle has an area proportional to a specified dimension of the data. Often the leaf nodes are colored to show a separate dimension of the data.
When the color and size dimensions are correlated in some way with the tree structure, one can often easily see patterns that would be difficult to spot in other ways, such as whether a certain color is particularly prevalent. A second advantage of treemaps is that, by construction, they make efficient use of space. As a result, they can legibly display thousands of items on the screen simultaneously.
To create a treemap, one must define a tiling algorithm, that is, a way to divide a region into sub-regions of specified areas. Ideally, a treemap algorithm would create regions that satisfy the following criteria:
These properties have an inverse relationship. As the aspect ratio is optimized, the order of placement becomes less predictable. As the order becomes more stable, the aspect ratio is degraded.[example needed]
To date, fifteen primary rectangular treemap algorithms have been developed:
Rectangular treemaps have the disadvantage that their aspect ratio might be arbitrarily high in the worst case. As a simple example, if the tree root has only two children, one with weight and one with weight , then the aspect ratio of the smaller child will be , which can be arbitrarily high. To cope with this problem, several algorithms have been proposed that use regions that are general convex polygons, not necessarily rectangular.



Convex treemaps were developed in several steps, each step improved the upper bound on the aspect ratio. The bounds are given as a function of - the total number of nodes in the tree, and - the total depth of the tree.

Hub AI
Treemapping AI simulator
(@Treemapping_simulator)
Treemapping
In information visualization and computing, treemapping is a method for displaying hierarchical data using nested figures, usually rectangles.
Treemaps display hierarchical (tree-structured) data as a set of nested rectangles. Each branch of the tree is given a rectangle, which is then tiled with smaller rectangles representing sub-branches. A leaf node's rectangle has an area proportional to a specified dimension of the data. Often the leaf nodes are colored to show a separate dimension of the data.
When the color and size dimensions are correlated in some way with the tree structure, one can often easily see patterns that would be difficult to spot in other ways, such as whether a certain color is particularly prevalent. A second advantage of treemaps is that, by construction, they make efficient use of space. As a result, they can legibly display thousands of items on the screen simultaneously.
To create a treemap, one must define a tiling algorithm, that is, a way to divide a region into sub-regions of specified areas. Ideally, a treemap algorithm would create regions that satisfy the following criteria:
These properties have an inverse relationship. As the aspect ratio is optimized, the order of placement becomes less predictable. As the order becomes more stable, the aspect ratio is degraded.[example needed]
To date, fifteen primary rectangular treemap algorithms have been developed:
Rectangular treemaps have the disadvantage that their aspect ratio might be arbitrarily high in the worst case. As a simple example, if the tree root has only two children, one with weight and one with weight , then the aspect ratio of the smaller child will be , which can be arbitrarily high. To cope with this problem, several algorithms have been proposed that use regions that are general convex polygons, not necessarily rectangular.
Convex treemaps were developed in several steps, each step improved the upper bound on the aspect ratio. The bounds are given as a function of - the total number of nodes in the tree, and - the total depth of the tree.
Recent media