Solid geometry
View on WikipediaThis article needs additional citations for verification. (May 2014) |

Solid geometry or stereometry is the geometry of three-dimensional Euclidean space (3D space).[1] A solid figure is the region of 3D space bounded by a two-dimensional closed surface; for example, a solid ball consists of a sphere and its interior.
Solid geometry deals with the measurements of volumes of various solids, including pyramids, prisms, cubes (and other polyhedrons), cylinders, cones (including truncated) and other solids of revolution.[2]
History
[edit]The Pythagoreans dealt with the regular solids, but the pyramid, prism, cone and cylinder were not studied until the Platonists. Eudoxus established their measurement, proving the pyramid and cone to have one-third the volume of a prism and cylinder on the same base and of the same height. He was probably also the discoverer of a proof that the volume enclosed by a sphere is proportional to the cube of its radius.[3]
Topics
[edit]Basic topics in solid geometry and stereometry include:
- incidence of planes and lines
- dihedral angle and solid angle
- the cube, cuboid, parallelepiped
- the tetrahedron and other pyramids
- prisms
- octahedron, dodecahedron, icosahedron
- cones and cylinders
- the sphere
- other quadrics: spheroid, ellipsoid, paraboloid and hyperboloids.
Advanced topics include:
- projective geometry of three dimensions (leading to a proof of Desargues' theorem by using an extra dimension)
- further polyhedra
- descriptive geometry.
List of solid figures
[edit]Whereas a sphere is the surface of a ball, for other solid figures it is sometimes ambiguous whether the term refers to the surface of the figure or the volume enclosed therein, notably for a cylinder.
| Figure | Definitions | Images | |
|---|---|---|---|
| Parallelepiped |
|
||
| Rhombohedron |
|

| |
| Cuboid |
|

| |
| Polyhedron | Flat polygonal faces, straight edges and sharp corners or vertices |  Small stellated dodecahedron |
 Toroidal polyhedron |
| Uniform polyhedron | Regular polygons as faces and is vertex-transitive (i.e., there is an isometry mapping any vertex onto any other) |   (Regular) Tetrahedron and Cube |
 Uniform Snub dodecahedron |
| Pyramid | A polyhedron comprising an n-sided polygonal base and a vertex point |  square pyramid square pyramid
| |
| Prism | A polyhedron comprising an n-sided polygonal base, a second base which is a translated copy (rigidly moved without rotation) of the first, and n other faces (necessarily all parallelograms) joining corresponding sides of the two bases |  hexagonal prism hexagonal prism
| |
| Antiprism | A polyhedron comprising an n-sided polygonal base, a second base translated and rotated.sides]] of the two bases |  square antiprism square antiprism
| |
| Bipyramid | A polyhedron comprising an n-sided polygonal center with two apexes. |  triangular bipyramid triangular bipyramid
| |
| Trapezohedron | A polyhedron with 2n kite faces around an axis, with half offsets |  tetragonal trapezohedron tetragonal trapezohedron
| |
| Cone | Tapers smoothly from a flat base (frequently, though not necessarily, circular) to a point called the apex or vertex |  A right circular cone and an oblique circular cone | |
| Cylinder | Straight parallel sides and a circular or oval cross section |  A solid elliptic cylinder |
 A right and an oblique circular cylinder |
| Ellipsoid | A surface that may be obtained from a sphere by deforming it by means of directional scalings, or more generally, of an affine transformation |  Examples of ellipsoids |
sphere (top, a=b=c=4), spheroid (bottom left, a=b=5, c=3), |
| Lemon | A lens (or less than half of a circular arc) rotated about an axis passing through the endpoints of the lens (or arc)[6] | ||
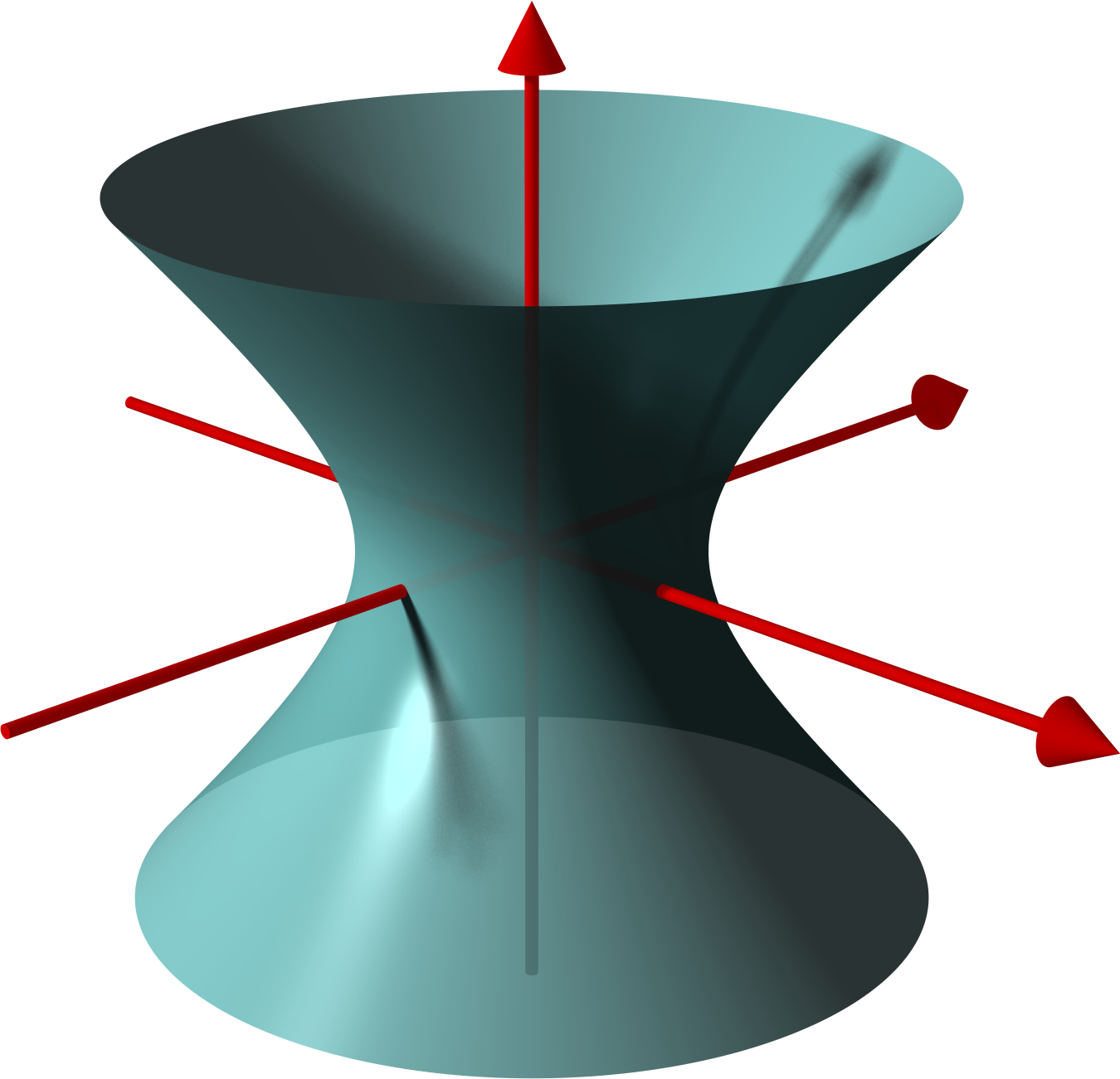
| Hyperboloid | A surface that is generated by rotating a hyperbola around one of its principal axes |
| |

Techniques
[edit]Various techniques and tools are used in solid geometry. Among them, analytic geometry and vector techniques have a major impact by allowing the systematic use of linear equations and matrix algebra, which are important for higher dimensions.
Applications
[edit]A major application of solid geometry and stereometry is in 3D computer graphics.
See also
[edit]Notes
[edit]- ^ The Britannica Guide to Geometry, Britannica Educational Publishing, 2010, pp. 67–68.
- ^ Kiselev 2008.
- ^ Paraphrased and taken in part from the 1911 Encyclopædia Britannica.
- ^ Robertson, Stewart Alexander (1984). Polytopes and Symmetry. Cambridge University Press. p. 75. ISBN 9780521277396.
- ^ Dupuis, Nathan Fellowes (1893). Elements of Synthetic Solid Geometry. Macmillan. p. 53. Retrieved December 1, 2018.
- ^ Weisstein, Eric W. "Lemon". Wolfram MathWorld. Retrieved 2019-11-04.
References
[edit]- Robert Baldwin Hayward (1890) The Elements of Solid Geometry via Internet Archive
- Kiselev, A. P. (2008). Geometry. Vol. Book II. Stereometry. Translated by Givental, Alexander. Sumizdat.
| International | |
|---|---|
| National | |
| Other | |
Solid geometry
View on GrokipediaIntroduction
Definition and Scope
Solid geometry is a branch of Euclidean geometry that focuses on the study of three-dimensional objects characterized by length, width, and depth.[4][5] Unlike plane geometry, which examines two-dimensional figures, solid geometry addresses the properties, relationships, and measurements of shapes in three-dimensional space.[6] This field distinguishes between bounded solids, which are finite regions of space enclosed by surfaces and possessing limited volume, and unbounded spaces, such as the infinite expanse of three-dimensional Euclidean space.[7] Bounded solids form the primary objects of study, enabling analysis of their spatial configurations and interactions.[8] Core principles of solid geometry extend foundational concepts from plane geometry to three dimensions, including congruence—where solids are identical in shape and size—and similarity, where solids share proportional dimensions while maintaining the same form.[9][10] These principles rest on Euclidean axioms governing points, lines, and planes, such as the existence of a unique line through any two points and a unique plane through any three non-collinear points. In contrast, if three points are collinear (lie on the same straight line), they do not determine a unique plane; instead, they lie in infinitely many planes—specifically, every plane that contains the line passing through them.[11] Foundational shapes like the sphere, cube, and cylinder serve as primitive examples for developing these ideas.[7] Although originating in ancient Greece with early explorations of spatial forms, solid geometry's Euclidean framework has seen extensions to non-Euclidean contexts, such as the curved geometries in general relativity.[12][13]Historical Context Overview
The foundations of solid geometry were laid in ancient Greece, building upon earlier developments in plane geometry. Euclid of Alexandria, around 300 BCE, systematically organized the subject in his seminal work Elements, particularly in Books XI through XIII, which address solid angles, polyhedra, and methods for calculating volumes of three-dimensional figures.[14] A key advancement came from Archimedes of Syracuse (c. 287–212 BCE), who extended these ideas through innovative techniques in works such as On the Sphere and Cylinder. He employed the method of exhaustion to determine the volumes of spheres, cylinders, and cones, establishing foundational results like the volume of a sphere being two-thirds that of its circumscribing cylinder.[15] During the Renaissance, interest in solid geometry revived with astronomical applications. Johannes Kepler, in his 1596 treatise Mysterium Cosmographicum, proposed a model of the solar system where the five Platonic solids were inscribed and circumscribed between the spherical orbits of the planets, linking geometric solids to cosmic structure.[16] In the 19th century, the study of solid geometry expanded beyond Euclidean frameworks through explorations of curved spaces. Carl Friedrich Gauss initiated investigations into non-Euclidean geometry around 1792, questioning the parallel postulate and laying groundwork for geometries where space curvature affects solid properties. Bernhard Riemann further developed this in his 1854 habilitation lecture on the hypotheses of geometry, introducing Riemannian manifolds that generalized solid geometry to curved, higher-dimensional spaces.[17][18] The 20th century saw rigorous advancements in understanding polyhedral equivalence. At the 1900 International Congress of Mathematicians, David Hilbert posed his third problem, asking whether any two polyhedra of equal volume can be dissected into finitely many polyhedral pieces that can be reassembled via rigid motions to form the other. This was negatively resolved in 1900 by Max Dehn, who introduced Dehn invariants to show that such dissections are not always possible, profoundly influencing the algebraic topology of solids.[19]Fundamental Concepts
Basic Elements in Three Dimensions
In three-dimensional Euclidean space, the foundational elements are points, lines, and planes, which serve as the building blocks for all solid figures. A point is defined as an exact location in space with no size, dimension, or shape.[20] A line is an infinite set of points extending in both directions along a straight path, representing the shortest connection between any two points it contains.[20][21] A plane is a flat, two-dimensional surface consisting of all points that lie on the same level, extending infinitely in all directions and determined uniquely by any three non-collinear points.[20][21] Spatial relationships among these elements distinguish three-dimensional geometry from its two-dimensional counterpart. Two lines are parallel if they lie in the same plane and do not intersect, maintaining a constant separation.[22][21] Lines are perpendicular if they intersect at a right angle, forming 90-degree angles at their point of meeting.[22] Uniquely in three dimensions, skew lines are neither parallel nor intersecting and do not lie in the same plane, allowing them to exist without meeting in space.[22][21] For planes, parallelism means they never intersect and maintain constant distance apart, while perpendicular planes intersect such that their normal directions form right angles. Angles in three dimensions extend planar concepts to volumetric interactions. A dihedral angle is formed by the intersection of two planes along a common line (the edge), measured as the angle between two rays perpendicular to that edge, each lying in one of the planes.[23] At a vertex where multiple planes meet, a solid angle quantifies the three-dimensional extent of the region bounded by those planes, analogous to a plane angle but encompassing a portion of space, often measured in steradians as the area projected onto a unit sphere centered at the vertex.[24] Intersections of these elements define how they connect in space. A line and a plane either intersect at a single point, with the line contained entirely within the plane, or the line is parallel to the plane without intersecting it.[21] Two planes intersect along a line if not parallel, or coincide if identical.[21] Two lines intersect at a point if coplanar and non-parallel, coincide if the same line, or remain skew without intersection.[21] These elements combine to fill three-dimensional space without gaps or overlaps when arranged to bound regions, as seen in the formation of polyhedral cells where planes serve as faces, lines as edges, and points as vertices, creating closed solids that tessellate space in certain configurations.[3] Vectors can represent directions and positions of these elements for further analysis.[25]Coordinate Systems and Vectors
In solid geometry, the Cartesian coordinate system provides a foundational framework for representing points and objects in three-dimensional space. This system extends the two-dimensional plane by introducing a third mutually perpendicular axis, denoted as the z-axis, which is typically oriented vertically while the x-axis points horizontally to the right and the y-axis points horizontally forward, following the right-hand rule for orientation. A point in this space is uniquely identified by an ordered triple , where , , and represent the signed distances from the origin along the respective axes.[26][27] Vectors are essential tools in this coordinate system, serving as directed line segments that encode both position and direction in 3D space. A position vector from the origin to a point is simply , where , , and are the standard unit vectors along the positive x-, y-, and z-axes, respectively. Direction vectors, in contrast, describe the orientation of lines or displacements without specifying a starting point, such as . The magnitude of a vector quantifies its length, given by , while a unit vector normalizes it to unit length via , isolating pure direction.[28][29] Vector operations enable precise geometric computations, with the dot product yielding a scalar that measures the cosine of the angle between two vectors, useful for determining orthogonality when the result is zero. The cross product , defined component-wise as the determinant of the matrix formed by , , and the components of and , produces a vector perpendicular to both inputs with magnitude , representing the area of the parallelogram they span and following the right-hand rule for direction. These operations underpin angle and area calculations in 3D configurations.[30][31][32] Distances in 3D space are derived directly from vector norms, with the Euclidean distance between two points and given by . For the distance from a point to a line defined by a point and direction vector , it is , capturing the shortest perpendicular separation. The distance from a point to a plane is , where the denominator is the norm of the plane's normal vector.[33][34][35] Parametric equations offer a vector-based parameterization for lines and planes, facilitating intersection and traversal analyses. A line passing through point with direction vector is expressed as , or component-wise , , , where traces the line. For a plane containing point and spanned by two non-parallel vectors and , the parametric form is , with , providing a surface parameterization in 3D space.[36][37]Types of Solid Figures
Polyhedra and Platonic Solids
A polyhedron is a three-dimensional shape composed of flat polygonal faces, straight edges where the faces meet, and vertices where the edges intersect. Polyhedra can be classified as convex or concave; a convex polyhedron has all interior angles less than 180 degrees and contains the line segment between any two points within it, while a concave polyhedron has at least one interior angle greater than 180 degrees, creating indentations.[38] A fundamental relation for convex polyhedra is Euler's formula, which states that the number of vertices , edges , and faces satisfyThis holds for any convex polyhedron that is topologically equivalent to a sphere.[39] Platonic solids are the most symmetric convex polyhedra, defined by strict regularity criteria: all faces are congruent regular polygons, and the same number of faces meet at each vertex.[40] There are exactly five such solids, each with a distinct symmetry group that describes its rotational and reflectional invariances.[41] The table below summarizes their key features:
| Solid | Number of Faces | Face Type | Vertices | Edges | Symmetry Group (Rotational Order) |
|---|---|---|---|---|---|
| Tetrahedron | 4 | Triangle | 4 | 6 | Tetrahedral (, 12) |
| Cube | 6 | Square | 8 | 12 | Octahedral (, 24) |
| Octahedron | 8 | Triangle | 6 | 12 | Octahedral (, 24) |
| Dodecahedron | 12 | Pentagon | 20 | 30 | Icosahedral (, 60) |
| Icosahedron | 20 | Triangle | 12 | 30 | Icosahedral (, 60) |