Recent from talks
Sine and cosine
Knowledge base stats:
Talk channels stats:
Members stats:
Sine and cosine
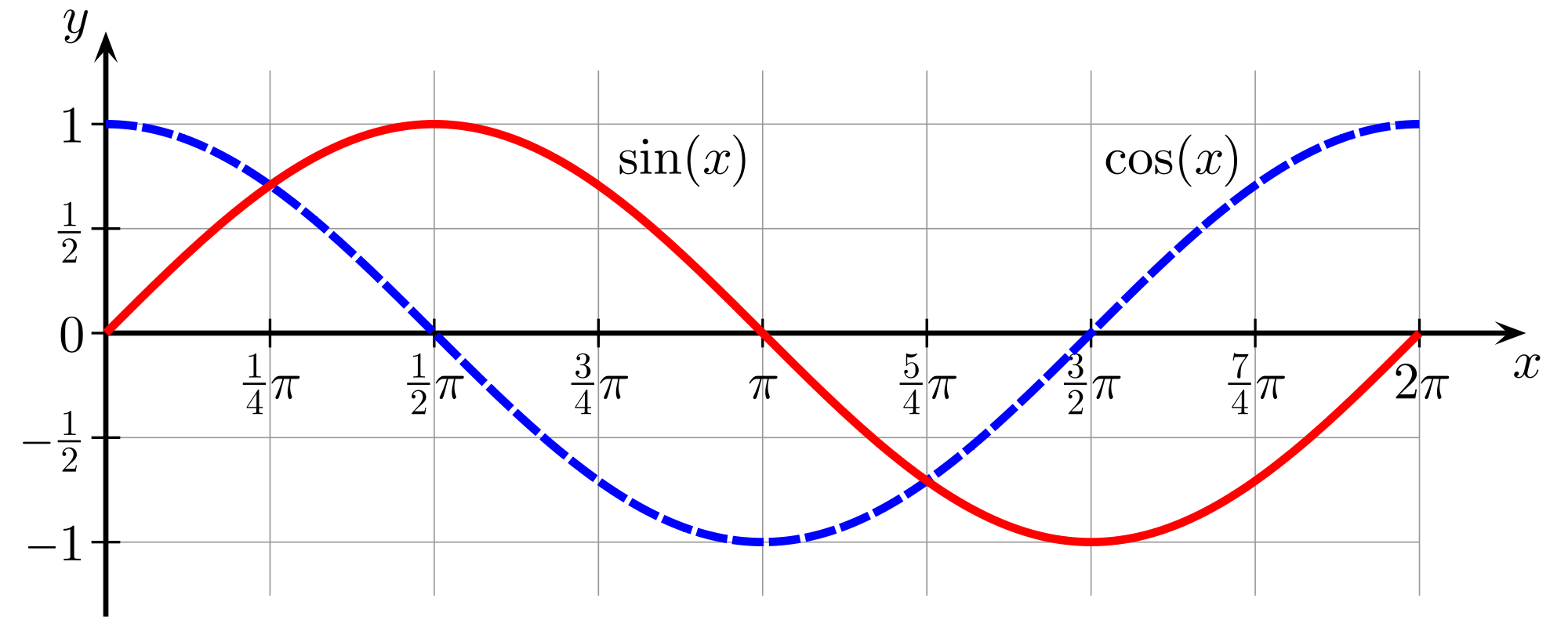
In mathematics, sine and cosine are trigonometric functions of an angle. The sine and cosine of an acute angle are defined in the context of a right triangle: for the specified angle, its sine is the ratio of the length of the side opposite that angle to the length of the longest side of the triangle (the hypotenuse), and the cosine is the ratio of the length of the adjacent leg to that of the hypotenuse. For an angle , the sine and cosine functions are denoted as and .



The definitions of sine and cosine have been extended to any real value in terms of the lengths of certain line segments in a unit circle. More modern definitions express the sine and cosine as infinite series, or as the solutions of certain differential equations, allowing their extension to arbitrary positive and negative values and even to complex numbers.
The sine and cosine functions are commonly used to model periodic phenomena such as sound and light waves, the position and velocity of harmonic oscillators, sunlight intensity and day length, and average temperature variations throughout the year. They can be traced to the jyā and koṭi-jyā functions used in Indian astronomy during the Gupta period.
To define the sine and cosine of an acute angle , start with a right triangle that contains an angle of measure ; in the accompanying figure, angle in a right triangle is the angle of interest. The three sides of the triangle are named as follows:


Once such a triangle is chosen, the sine of the angle is equal to the length of the opposite side divided by the length of the hypotenuse, and the cosine of the angle is equal to the length of the adjacent side divided by the length of the hypotenuse:

The other trigonometric functions of the angle can be defined similarly; for example, the tangent is the ratio between the opposite and adjacent sides or equivalently the ratio between the sine and cosine functions. The reciprocal of sine is cosecant, which gives the ratio of the hypotenuse length to the length of the opposite side. Similarly, the reciprocal of cosine is secant, which gives the ratio of the hypotenuse length to that of the adjacent side. The cotangent function is the ratio between the adjacent and opposite sides, a reciprocal of a tangent function. These functions can be formulated as:

As stated, the values and appear to depend on the choice of a right triangle containing an angle of measure . However, this is not the case as all such triangles are similar, and so the ratios are the same for each of them. For example, each leg of the 45-45-90 right triangle is 1 unit, and its hypotenuse is ; therefore, . The following table shows the special value of each input for both sine and cosine with the domain between . The input in this table provides various unit systems such as degree, radian, and so on. The angles other than those five can be obtained by using a calculator.





The law of sines is useful for computing the lengths of the unknown sides in a triangle if two angles and one side are known. Given a triangle with sides , , and , and angles opposite those sides , , and , the law states, This is equivalent to the equality of the first three expressions below: where is the triangle's circumradius.








Hub AI
Sine and cosine AI simulator
(@Sine and cosine_simulator)
Sine and cosine
In mathematics, sine and cosine are trigonometric functions of an angle. The sine and cosine of an acute angle are defined in the context of a right triangle: for the specified angle, its sine is the ratio of the length of the side opposite that angle to the length of the longest side of the triangle (the hypotenuse), and the cosine is the ratio of the length of the adjacent leg to that of the hypotenuse. For an angle , the sine and cosine functions are denoted as and .
The definitions of sine and cosine have been extended to any real value in terms of the lengths of certain line segments in a unit circle. More modern definitions express the sine and cosine as infinite series, or as the solutions of certain differential equations, allowing their extension to arbitrary positive and negative values and even to complex numbers.
The sine and cosine functions are commonly used to model periodic phenomena such as sound and light waves, the position and velocity of harmonic oscillators, sunlight intensity and day length, and average temperature variations throughout the year. They can be traced to the jyā and koṭi-jyā functions used in Indian astronomy during the Gupta period.
To define the sine and cosine of an acute angle , start with a right triangle that contains an angle of measure ; in the accompanying figure, angle in a right triangle is the angle of interest. The three sides of the triangle are named as follows:
Once such a triangle is chosen, the sine of the angle is equal to the length of the opposite side divided by the length of the hypotenuse, and the cosine of the angle is equal to the length of the adjacent side divided by the length of the hypotenuse:
The other trigonometric functions of the angle can be defined similarly; for example, the tangent is the ratio between the opposite and adjacent sides or equivalently the ratio between the sine and cosine functions. The reciprocal of sine is cosecant, which gives the ratio of the hypotenuse length to the length of the opposite side. Similarly, the reciprocal of cosine is secant, which gives the ratio of the hypotenuse length to that of the adjacent side. The cotangent function is the ratio between the adjacent and opposite sides, a reciprocal of a tangent function. These functions can be formulated as:
As stated, the values and appear to depend on the choice of a right triangle containing an angle of measure . However, this is not the case as all such triangles are similar, and so the ratios are the same for each of them. For example, each leg of the 45-45-90 right triangle is 1 unit, and its hypotenuse is ; therefore, . The following table shows the special value of each input for both sine and cosine with the domain between . The input in this table provides various unit systems such as degree, radian, and so on. The angles other than those five can be obtained by using a calculator.
The law of sines is useful for computing the lengths of the unknown sides in a triangle if two angles and one side are known. Given a triangle with sides , , and , and angles opposite those sides , , and , the law states, This is equivalent to the equality of the first three expressions below: where is the triangle's circumradius.
Recent media