
Community hub
Recent from talks
Contribute something
Nothing was collected or created yet.
Lunokhod programme
View on Wikipedia


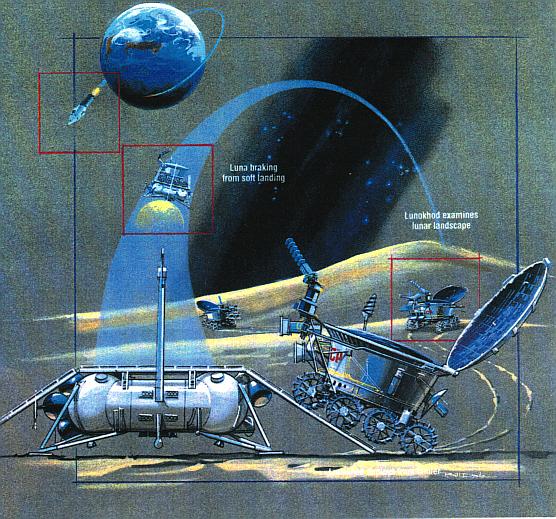
Lunokhod (Russian: Луноход, IPA: [lʊnɐˈxot], "Moonwalker") was a series of Soviet robotic lunar rovers designed to land on the Moon between 1969 and 1977. Lunokhod 1 was the first roving remote-controlled robot to land on an extraterrestrial body.
The 1969 Lunokhod 1A (Lunokhod 0, Lunokhod No. 201) was destroyed during launch, the 1970 Lunokhod 1 and the 1973 Lunokhod 2 landed on the Moon, and Lunokhod 3 (Lunokhod No. 205, planned for 1977) was never launched. The successful missions were in operation concurrently with the Zond and Luna series of Moon flyby, orbiter and landing missions.
The Lunokhods were primarily designed to support the Soviet human Moon missions during the Moon race. Instead, they were used as remote-controlled robots for exploration of the lunar surface and returning pictures, after the Apollo human lunar landings and cancellation of the Soviet human Moon programme.
The Lunokhods were transported to the lunar surface by Luna spacecraft, which were launched by Proton-K rockets.
Development
[edit]
Lunokhod's original primary mission was to be the back-up for L3 crewed Moon expeditions and for the later Zvezda lunar base.[citation needed] For mission safety, weeks before the human mission on a LK lander, an LK-R uncrewed lander from the L3 lunar expedition complex and two Lunokhod automated rovers would be sent to the Moon for a preliminary study of the surface around LK-R and LK sites, to act as radio beacons for precision landings of LK-R and LK, and for a visual evaluation of the status of the site.[1]
In mid-1968, at the facility KIP-10 or NIP-10 (КИП-10 or НИП-10, located at 45°03′10″N 33°53′25″E / 45.052703°N 33.890256°E)[2] in the closed town Shkolnoye (Simferopol-28), near Simferopol, Crimea, a lunodrom (лунодром - Moondrome, located at 45°03′15″N 33°53′37″E / 45.054212°N 33.893627°E) was built. It covered an area of one hectare (120 meters by 70 meters) and was very similar to some parts of the lunar surface. It was constructed using more than 3,000 cubic meters of soil, and included 54 craters up to 16 m in diameter and around about 160 rocks of various sizes.[3] The whole area was surrounded with bricks, painted in gray and black. It was used to analyze problems with the Lunokhod chassis and cosmonaut's skill to control one.[4][5]
Closed town Simferopol-28 contained the most significant tracking facility in the Soviet Union, having the largest number of antennas, the largest area, and the most personnel of any of the Soviet tracking facilities. The facility was one of a network of ten facilities which contain earth satellite vehicle tracking equipment and provide command/control for Soviet near-space civil and military events. Additionally, this facility supported all lunar programmes of the Soviet Union, in association with the Evpatoria Deep Space Tracking Facility.[6][7]
At least four complete vehicles were constructed, with the serial numbers 201, 203, 204 and 205.[citation needed]
Rover design
[edit]

The Lunokhod rovers were lunar vehicles formed of a tub-like compartment with a large convex lid on eight independently-powered wheels. They were equipped with a cone-shaped antenna, a highly directional helical antenna, television cameras, and special extendable devices to impact the lunar soil for density measurements and mechanical property tests, plus a scientific payload which varied with the mission.
The Lunokhods were designed under the leadership of Georgy Babakin[8] at Lavochkin design bureau. The metal chassis themselves were designed by Alexander Kemurdzhian.
The vehicles were powered by batteries. The rover ran during the lunar day, stopping occasionally to recharge its batteries using its solar panels. The power was supplied during the lunar day by a GaAs solar array on the inside of a round hinged lid which covered the instrument bay, which would charge the batteries when opened. During the lunar nights, the lid was closed and a polonium-210 radioisotope heater unit kept the internal components at operating temperature.[9]
To be able to work in a vacuum a special fluoride-based lubricant was used for the rover's mechanical parts, and the electric motors, one in each wheel hub, were enclosed in pressurised containers.[10][11]
The rovers stood 135 centimetres (4 feet 5 inches) high and had a mass of 840 kg (1,850 lb). It was about 170 centimetres (5 feet 7 inches) long and 160 centimetres (5 feet 3 inches) wide and had eight wheels each with an independent suspension, motor and brake. The rover had two speeds, approximately 1 and 2 km/h (0.6 and 1.2 mph).
The Lunokhods were transported to the lunar surface by Luna spacecraft, which were launched by Proton-K rockets. The Moon lander part of the Luna spacecraft for Lunokhods was similar to the one for sample-return missions.
Lunokhod Rovers
[edit]Lunokhod 201
[edit]After years of secret engineering development and training, the first Lunokhod (vehicle 8ЕЛ№201) was launched on February 19, 1969. Within a few seconds the rocket disintegrated and the first Lunokhod was lost. The rest of the world did not learn of the rocket's valuable payload until years later.[12] The failure resulted in the radioactive heat source, polonium 210, being spread over a large region of Russia.[13]
Lunokhod 1
[edit]This section needs additional citations for verification. (April 2019) |
.jpg)
_(6).jpg)
After the destruction of the original Lunokhod, Soviet engineers began work immediately on another lunar vehicle. Lunokhod 1 (vehicle 8ЕЛ№203) was the first of two uncrewed lunar rovers successfully landed on the Moon by the Soviet Union as part of its Lunokhod programme. The spacecraft which carried Lunokhod 1 was named Luna 17. Lunokhod 1 was the first roving remote-controlled robot to land on another world.
Luna 17 was launched on November 10, 1970 at 14:44:01 UTC. After reaching Earth parking orbit, the final stage of Luna 17's launching rocket fired to place it into a trajectory towards the Moon (November 10, 1970 at 14:54 UTC). After two course correction manoeuvres (on November 12 and 14) it entered lunar orbit on November 15, 1970 at 22:00 UTC.
The spacecraft soft-landed on the Moon in the Sea of Rains on November 17, 1970 at 03:47 UTC. The lander had dual ramps from which the payload, Lunokhod 1, could descend to the surface. At 06:28 UT the rover moved down the ramps and onto the Moon.
The rover's payload included cameras (two television and four panoramic telephotometers), a RIFMA X-ray fluorescence spectrometer, an RT-1 X-ray telescope, a PrOP odometer/penetrometer, a RV-2N radiation detector, and a TL laser retroreflector.[14]
An urban legend was spread among the Soviet Union that the Lunokhod rover was driven by a “KGB Dwarf”,[15] however it was never explained how supplies were stored to keep them alive for an 11-month mission.
Lunokhod 2
[edit]This section needs additional citations for verification. (April 2019) |

Lunokhod 2 (vehicle 8ЕЛ№204) was the second and more advanced of the two Lunokhod rovers. The launcher put the spacecraft into Earth parking orbit on January 8, 1973, followed by a translunar injection. On January 12, 1973, Luna 21 was braked into a 90 by 100 km (56 by 62 miles) lunar orbit.
The Luna 21 spacecraft landed on the Moon to deploy the second Soviet lunar rover, Lunokhod 2. The primary objectives of the mission were to collect images of the lunar surface, examine ambient light levels to determine the feasibility of astronomical observations from the Moon, perform laser ranging experiments from Earth, observe solar X-rays, measure local magnetic fields, and study mechanical properties of the lunar surface material.
The landing occurred on January 15, 1973 at 23:35 UT in Le Monnier crater (25.85 degrees N, 30.45 degrees E).
After landing the Lunokhod 2 took television images of the surrounding area, then rolled down a ramp to the surface at 01:14 UT on 1973-01-16. It then took pictures of the Luna 21 lander and landing site.
The rover was equipped with three slow-scan television cameras, one mounted high on the rover for navigation, which could return high resolution images at different rates—3.2, 5.7, 10.9 or 21.1 seconds per frame (not frames per second). These images were used by the five-man team of controllers on Earth who sent driving commands to the rover in real time.[16] There were four panoramic cameras mounted on the rover.
Scientific instruments included a soil mechanics tester, solar X-ray experiment, an astrophotometer to measure visible and ultraviolet light levels, a magnetometer deployed in front of the rover on the end of a 2.5 m (8 ft 2 in) boom, a radiometer, a photodetector (Rubin-1) for laser detection experiments, and a French-supplied laser corner reflector.
Payload
[edit]- Cameras (three television and four panoramic telephotometers)
- RIFMA-M X-ray fluorescence spectrometer
- X-ray telescope
- PROP odometer/penetrometer
- RV-2N-LS radiation detector
- TL laser retroreflector
- AF-3L UV/visible astrophotometer
- SG-70A magnetometer
- Rubin 1 photodetector
Lunokhod 3
[edit]

Lunokhod 3 (vehicle 8ЕЛ№205) was built for a Moon landing in 1977 as Luna 25,[17] but never flew to the Moon due to lack of launchers and funding. It remains at the NPO Lavochkin museum.[18]
Results
[edit]During its 322 Earth days of operations, Lunokhod 1 travelled 10.5 km (6.5 miles) and returned more than 20,000 television images and 206 high-resolution panoramas.[19] In addition, it performed twenty-five soil analyses with its RIFMA x-ray fluorescence spectrometer and used its penetrometer at 500 different locations.
Lunokhod 2 operated for about four months, covered 42 km (26 miles) of terrain,[20] including driving into hilly upland areas and rilles. Lunokhod 2 held the record for the longest distance of surface travel of any extraterrestrial vehicle until 2014.[12] It sent back 86 panoramic images and over 80,000 television pictures. Many mechanical tests of the Moon's surface, laser ranging measurements, and other experiments were completed during this time.
In 2010, nearly forty years after the 1971 loss of signal from Lunokhod 1, the NASA Lunar Reconnaissance Orbiter photographed its tracks and final location, and researchers, using a telescopic pulsed-laser rangefinder, detected the robot's retroreflector.[21]
Not until Mars Pathfinder's deployment of the "Sojourner" Rover in 1997 was another remote-controlled vehicle put on an extraterrestrial body. For comparison, the similarly sized NASA Mars Exploration Rovers, Spirit and Opportunity had, by their fifth anniversary in January 2009, traveled a total of 21 km (13 miles) and transmitted over 125,000 images.[22]
Legacy
[edit]According to a French documentary television film Tank on the Moon by Jean Afanassieff, the Lunokhod design returned to the limelight 15 years later due to the Chernobyl nuclear power plant disaster on April 26, 1986.[23] The East German-built remote controlled bulldozers available to Soviet civil defense troops weighed dozens of tons – too heavy to operate on the remaining parts of the partially collapsed reactor building roof. Human labourers could not be employed to shovel debris since work shifts were limited to 90-second intervals due to intense ionizing radiation.[24]
Lunokhod designers were called back from retirement, and in two weeks rovers were made which used nuclear decay heat sources for internal rack climate control, their electronic systems were already hardened to partly resist radiation.[23] This benefit allowed the 1986 designers to quickly devise a derived vehicle type for nuclear disaster recovery work. On July 15, two rovers, called STR-1,[12] were delivered to the Chernobyl accident zone and proved useful for clearing debris, earning awards for the designers. Due to extremely high radiation levels, both STR-1 rovers eventually failed, and human workers (later named liquidators) were called in once again.[23][25]
Locations and ownership
[edit]
Until 2010, the final location of Lunokhod 1 was uncertain by a few kilometers.[26] Lunar laser ranging experiments had failed to detect a return signal from its retroreflector since the 1970s.[27] On March 17, 2010, Albert Abdrakhimov found both the lander and the rover[28] in Lunar Reconnaissance Orbiter image M114185541RC.[29] On April 22, Tom Murphy (UCSD) and Russet McMillan at the Apache Point Observatory detected the robot's retroreflector using the Apache Point telescopic pulsed-laser rangefinder.[21]
Lunokhod 2 continues to be detected by lunar laser ranging experiments and its position is known to sub-metre accuracy. Ownership of Lunokhod 2 and the Luna 21 lander was sold by the Lavochkin Association for US$68,500 in December 1993 at a Sotheby's auction in New York[30] (although the catalogue incorrectly lists lot 68A as Luna 17/Lunokhod 1).[31] The buyer was computer gaming entrepreneur and astronaut's son Richard Garriott, who is also known by the name of his gaming character Lord British. Garriott stated in a 2001 interview: "I purchased Lunakod 21 [sic] from the Russians. I am now the world's only private owner of an object on a foreign celestial body. Though there are international treaties that say no government shall lay claim to geography off planet earth, I am not a government. Summarily, I claim the Moon in the name of Lord British!"[32] In 2007, Garriott said he is still the owner of Lunokhod 2.[33][34]
See also
[edit]References
[edit]- ^ "Soyuz 7K-LOK". www.astronautix.com. Retrieved 2022-11-07.
- ^ "10.7 Луноходы Симф". kik-sssr.ru. Archived from the original on 2021-10-27. Retrieved 2015-07-27.
- ^ "NIP-10 Simferopol Near Earth Satellite Center, The Lunokhod Moon Drome". flickr.com. 30 August 2011.
- ^ Космическая энциклопедия (in Russian). September 18, 2008.
- ^ "Panoramio is no longer available". www.panoramio.com. Archived from the original on 2017-09-28. Retrieved 2017-10-27.
- ^ NATIONAL PHOTOGRAPHIC INTERPRETATION CENTER June 1969 SIMFEROPOL SPACEFLIGHT CENTER
- ^ "Infinity Beckoned by Jay Gallentine". Archived from the original on September 4, 2015.
- ^ "Lunochod's chief designer is dead". Cosmic Mirror. March 6, 2003. Archived from the original on May 1, 2003.
- ^ Blair, Sean (March 14, 2011)." Rovers learning from Lunokhod", E&T News. Retrieved 23 June 2022.
- ^ "Den ryska månbilen". Vetenskapens värld (in Swedish). 11 February 2008. SVT2. Archived from the original on 2 June 2008. Retrieved 11 February 2008.
- ^ "Moon applications". Synlube Lube-4-Life.
- ^ a b c "Tank on the Moon". The Nature of Things with David Suzuki. December 6, 2007. CBC-TV. Archived from the original on December 26, 2008.
- ^ Karacalıoğlu, Göktuğ (January 6, 2014). "Energy Resources for Space Missions". Space Safety Magazine. Retrieved January 18, 2014.
- ^ "In Depth | Luna 17". NASA Solar System Exploration. Archived from the original on 2022-06-29. Retrieved 2022-06-29.
- ^ "KGB Dwarf". www.astronautix.com. Retrieved 2022-06-26.
- ^ "Экипажи Лунохода". www.astronaut.ru.
- ^ Harvey, Brian (17 August 2007). Soviet and Russian Lunar Exploration. Springer. p. 280. ISBN 9780387218960. Retrieved 2014-04-20.
- ^ Chaikin, Andy (February–March 2004). "The Other Moon Landings". Air & Space. Archived from the original on 2014-05-11.
- ^ "Lunokhod 1 Panoramas". planetology.ru. Retrieved April 30, 2013.
- ^ Wall, Mike (July 11, 2013). "NASA Moon Probe Helps Revise Off-Planet Driving Record | Lunokhod 2". Space.com. Retrieved July 12, 2013.
- ^ a b Bleicher, Ariel (August 2010). "Forgotten Soviet Moon Rover Beams Light Back to Earth". IEEE Spectrum. Archived from the original on 2011-08-20. Retrieved 2011-05-28.
- ^ "Public Events Mark Mars Rovers' Five-Year Anniversary" (Press release). Jet Propulsion Laboratory. January 12, 2009. Archived from the original on May 9, 2009. Retrieved April 26, 2009.
- ^ a b c Zarowny, Andrew (March 16, 2011). "Lunokhod: From the Moon to Chernobyl, the Little Robot That Could!". Right Pundits. Archived from the original on March 18, 2011. Retrieved June 21, 2016.
- ^ McDougal, Heather (February 19, 2009). "Lunokhod and the Art of Space". Cabinet of Wonders. Retrieved June 21, 2016.
- ^ Anderson, Christopher (January 20, 1990). "Soviet Official Admits That Robots Couldn't Handle Chernobyl Cleanup". The Scientist. Canada. Retrieved June 21, 2016.
- ^ Stooke, P.J. (2005). Lunar laser ranging and the location of Lunokhod 1 (PDF). Lunar & Planetary Science XXXVI.
- ^ David, Leonard (March 27, 2006). "Lunar Lost & Found: The Search for Old Spacecraft". SPACE.com.
- ^ Lakdawalla, Emily (March 17, 2010). "And now for Luna 17 and Lunokhod 1". Planetary Report. Archived from the original on March 18, 2012. Retrieved April 12, 2010.
- ^ "LROC Observation M114185541R". Arizona State University.
- ^ Kluger, Jeffrey (April 1994). "The Bloc on the Block". Discover Magazine.
- ^ Sotheby's Catalogue - Russian Space History, Addendum, Lot 68A, December 11, 1993
- ^ Yans, Cindy (April 13, 2001). "Lord British, we hardly knew ye". Computer Games Magazine. via Demiurg.net.
- ^ "The Astronaut's Son's Secret Sputnik". CollectSPACE. October 2, 2007.
- ^ Garriott, Owen (December 10, 2007). "Sputnik: 50 Years, One Month, Two Weeks Later". Are We Alone (Interview). Interviewed by Seth Shostak. SETI Institute.
Further reading
[edit]- Vinogradov, A. P., ed. (1971). Peredvizhnaya Laboratoriya na Lune Lunokhod-1. Tom 1 (in Russian). Moscow: Nauka.
- Barsukov, V. L., ed. (1978). Peredvizhnaya Laboratoriya na Lune Lunokhod-1. Tom 2 (in Russian). Moscow: Nauka.
External links
[edit]- Lunar and Planetary Department Moscow University
- Exploring the Moon (1969-1976) - a diary of significant events in Soviet lunar exploration, including those associated with the Lunokhod programme
- Don P. Mitchell's catalog of Soviet Moon Images including many from the Lunokhod programme
- Remote control lunokhods and planetrovers Archived 2020-08-12 at the Wayback Machine (in Russian)
- Details of the cameras used in the Lunokhods (about halfway down the page, or search the page for "Lunokhod")
.svg)
Lunokhod programme
View on GrokipediaHistorical Context
Soviet Lunar Exploration Efforts
The Soviet Union's lunar exploration efforts commenced with the Luna programme in the late 1950s, marking early milestones in interplanetary travel. On September 12, 1959, Luna 2 achieved the first spacecraft impact on the lunar surface, confirming the Moon's lack of significant magnetic field through onboard instrumentation.[8] Shortly thereafter, on October 4, 1959, Luna 3 executed the first successful circumnavigation of the Moon, transmitting the initial photographs of its far side, which revealed a rugged terrain dominated by craters rather than vast maria.[8] These missions demonstrated the feasibility of lunar trajectories using the Molniya launch vehicle and laid groundwork for subsequent probes, despite numerous launch and guidance failures in the intervening years.[9] Advancements accelerated in the mid-1960s with efforts focused on soft landings and orbital reconnaissance. Luna 9, launched on January 31, 1966, accomplished the world's first controlled soft landing on February 3, 1966, in Oceanus Procellarum, where it deployed a camera that relayed panoramic images confirming the regolith's dust-like consistency suitable for supporting heavier landers.[10] This was followed by Luna 10 in April 1966, the first artificial satellite to orbit the Moon, which mapped gravitational anomalies and radiation belts over 56 days.[9] By the late 1960s, the programme had achieved seven successful soft landings, providing data on surface composition and micrometeoroid flux that informed engineering for extended surface operations.[9] The 1970s emphasized sample returns and mobility, yielding further empirical insights into lunar geology. Luna 16, launched September 12, 1970, executed the first robotic sample return on September 24, retrieving 101 grams of basaltic material from Mare Fecunditatis for Earth-based analysis, which revealed similarities to terrestrial ocean floor basalts but with distinct isotopic signatures.[11] Subsequent missions Luna 20 in 1972 and Luna 24 in 1976 added highland and mare samples, respectively, totaling over 300 grams returned unmanned.[11] These automated retrievals, using drilling mechanisms and ascent stages, underscored the Soviet emphasis on precision robotics amid parallel but ultimately unsuccessful manned landing attempts constrained by N1 booster failures.[9]Strategic Rationale for Unmanned Rovers
The Lunokhod rovers were initially developed as components of the Soviet N1-L3 manned lunar landing program, with the intent to serve as precursors for scouting potential landing sites, mapping terrain, and performing initial geological surveys to aid cosmonaut missions.[3] This integration stemmed from the need for extended surface mobility beyond what stationary landers could provide, allowing for broader data collection in preparation for human presence.[12] Following the N1 rocket's four consecutive launch failures between 1969 and 1972, which rendered manned lunar landings unfeasible, the program was officially canceled by Soviet decree on May 2, 1974.[13] [14] In response, Soviet leadership pivoted to unmanned exploration via the reliable Proton launcher and Luna spacecraft, repurposing Lunokhod for autonomous robotic operations to sustain lunar scientific endeavors without the prohibitive costs and risks associated with human spaceflight.[3] [2] This shift emphasized rovers' capacity for prolonged missions, as evidenced by Lunokhod 1's traversal of 10.5 kilometers over 322 Earth days (equivalent to 11 lunar days), far exceeding the limited extravehicular activity durations of manned Apollo excursions.[2] [3] Unmanned rovers enabled systematic soil mechanics testing, panoramic imaging of over 80,000 square meters, and the establishment of the first lunar laser ranging reflector, yielding data on regolith properties and Earth-Moon distance measurements that informed global geodetic models.[2] [15] Strategically, the unmanned approach allowed the USSR to project technological prowess in the post-Apollo era, countering American dominance through verifiable achievements in remote planetary mobility and instrumentation, while mitigating the political fallout from manned program shortfalls.[3] Soviet evaluators highlighted rovers' economic efficiency, noting that operations cost a fraction of manned equivalents and avoided life-support complexities, thus prioritizing empirical data return over prestige-driven human presence.[2] [15] This rationale underscored a pragmatic adaptation to resource constraints, leveraging existing hardware for causal advancements in lunar science rather than pursuing unattainable crewed goals.[16]Development and Prototyping
Conceptual Origins
The Lunokhod rover concept emerged in the early 1960s amid the Soviet Union's push for manned lunar exploration, initially tied to Sergei Korolev's L2 circumlunar project launched in 1963. By 1965, it had formalized as the Ye-8 variant under OKB-1, with the primary objectives of scouting potential landing sites for manned missions and bases, while serving as a radio homing beacon to guide the LK lunar lander during descent.[17] This design reflected first-principles engineering priorities for mobility on the lunar surface, prioritizing traversal over static landers to expand scientific reach and operational flexibility in support of human precursors.[17] Development authority shifted to the Lavochkin design bureau in 1965 under chief designer Georgy Babakin, who adapted the Ye-8 for compatibility with the Proton launch vehicle to achieve the necessary payload mass of approximately 5,590 kg for the full stack, including the 840 kg rover.[17] Early proposals in 1967 explored integrating life support systems for potential cosmonaut rescue or extended human oversight, but Babakin deemed these impractical due to technical constraints and mass penalties, refocusing on fully autonomous remote control.[17] The program's conceptual framework crystallized around eight-skid mobility for traversing regolith and obstacles, drawing from terrestrial analogs like planetary rovers tested in Soviet labs, though initial emphasis remained on enabling the N1-L3 manned landing architecture.[17] After the Apollo 11 success in July 1969 exposed delays in the Soviet crewed effort, priorities pivoted explicitly to robotic science missions, emphasizing geological sampling, panoramic imaging, and soil mechanics analysis independent of human presence.[17] This evolution underscored causal trade-offs in resource allocation, favoring proven unmanned hardware over riskier manned pursuits amid geopolitical setbacks.Key Engineering Milestones
The self-propelled chassis of the Lunokhod rovers represented a foundational engineering milestone, with development commencing in February 1965 through an assignment to VNII-100 (later VNIITRANSMASH) under the Lavochkin Design Bureau's oversight.[18] This effort produced an eight-wheel planetary rover platform with independent direct-current electric motors for each wheel, delivering approximately 0.2 kW of propulsion power and enabling traversal speeds up to 2 km/h on simulated lunar regolith.[19] The design incorporated passive spring suspension and conical wheels fitted with grousers—protruding metal cleats—to optimize traction and minimize soil displacement, addressing the challenges of low-gravity, fine-grained lunar soil mechanics.[20] A pivotal innovation was the skid-steering mechanism, which facilitated turns by differentially braking or accelerating wheels on opposite sides without relying on traditional differentials or steering linkages, allowing a turning radius as small as the vehicle's width while distributing torque to maintain stability on slopes up to 30 degrees.[21] Redundancy was engineered through the ability to explosively jettison individual wheels if immobilized by craters or rocks, preserving mobility with as few as four functional wheels.[22] These features were iteratively refined via prototypes tested on Earth analogs, culminating in the chassis's qualification for spaceflight by 1969. Thermal and power systems marked another breakthrough, with the chassis supporting a hermetically sealed, bathtub-shaped instrument compartment to shield electronics from dust ingress and radiative cooling.[19] Power was supplied by four deployable solar panels totaling 1.5 square meters, generating up to 180 W during lunar daylight, augmented by twelve polonium-210 radioisotope heaters (each with 30 g of isotope) providing 32 W of thermal output to sustain operations across temperature extremes from -150°C to +100°C.[23] This RTG-based approach, leveraging radioactive decay for reliable, non-mechanical heating, ensured instrument viability without active cryocoolers, a design choice validated in vacuum chamber simulations that confirmed survival through lunar night hibernations.[21]Pre-Launch Testing
The Lunokhod programme's pre-launch testing encompassed rigorous ground-based simulations, prototype evaluations, and subsystem verifications to ensure reliability under lunar-analog conditions. Prototypes, including engineering models like Lunokhod 201, underwent mobility trials in simulated lunar regolith to assess wheel traction, suspension dynamics, and obstacle navigation, with tests revealing the need for refinements in the eight-wheel drive system to handle uneven terrain slopes up to 30 degrees.[17] These evaluations were conducted at specialized facilities, including a lunodrom in Crimea covering approximately 120 meters by 70 meters, surfaced with materials mimicking lunar soil to replicate low-gravity handling and dust interactions.[24] Operator training and remote control system validation formed a core component, with human controllers practicing navigation via television feedback links over distances simulating Earth-Moon latency, emphasizing ergonomics, fatigue monitoring, and decision-making under stress; these Crimea-based sessions logged thousands of kilometers of virtual traversal to optimize command protocols before flight hardware integration.[24] Thermal-vacuum chamber tests at Soviet institutes exposed rover assemblies to temperature extremes from -150°C to +100°C and vacuum levels approximating space, confirming the effectiveness of the lid mechanism for radiators and isotope heaters in maintaining internal electronics above operational thresholds.[15] Subsystem-specific trials included vibration and acoustic simulations replicating launch vibrations on the Proton rocket, with accelerometers recording up to 10g forces to validate structural integrity of the 756 kg chassis and instrument payloads.[17] Early orbital qualification occurred via Luna 14 on April 7, 1968, which deployed a Lunokhod propulsion test unit into lunar orbit to assess electric motor performance and attitude control thrusters in microgravity, confirming thrust levels of 20-30 m/s delta-v without anomalies.[25] Final integration testing at the Transmash Bureau in Leningrad integrated scientific instruments like the X-ray spectrometer and penetrometer, with end-to-end functional checks ensuring panoramic camera resolution of 0.5° and soil sampling depths up to 10 cm.[26] These phases collectively mitigated risks identified in prior failures, such as the 1969 Luna Ye-8-5 crash due to propulsion glitches, paving the way for successful deployments.[17]Technical Design
Structural and Mobility Features
The Lunokhod rovers consisted of an airtight instrument compartment mounted atop an eight-wheel self-propelled chassis engineered for reliability and mobility on the lunar surface.[15] The chassis adopted a tub-like structure to encase electronics and provide structural integrity, with the instrument section forming a truncated cone shape sealed against vacuum and temperature extremes.[15] This design for Lunokhod 1 measured approximately 2.2 meters in length and width, with a mass of 756 kg excluding the descent module.[15] Mobility relied on eight independently driven wheels arranged in a 2x4 configuration, each featuring an individual electric motor integrated into the hub along with a reduction gear for torque amplification.[15] Independent torsional suspension per wheel absorbed shocks from regolith irregularities, enabling operation over slopes up to 30 degrees and obstacles up to 0.5 meters high.[21] The wheels, 51 cm in diameter, incorporated a wire mesh supported by thin spokes, a solid rim, and angled grousers to maximize traction and minimize sinkage in loose lunar soil.[2][27] Steering employed skid-steering, achieved by varying motor speeds between the left and right wheel sets—slowing or reversing inner-side wheels to induce controlled slipping and pivoting without dedicated linkages.[28] This mechanism allowed tight turns, including in-place rotation, while distributing power across all wheels for forward propulsion at speeds up to 2 km/h.[21] Lunokhod 2 utilized an analogous chassis and mobility system, with refinements such as enhanced wheel gearing for greater traverse efficiency, contributing to its longer operational distance.[21]Power, Thermal, and Communication Systems
The Lunokhod rovers relied on solar photovoltaic cells as the primary power source, with silicon panels mounted on the interior of a deployable lid that formed the top of the sealed instrument compartment. This lid could be adjusted to angles between 0 and 110 degrees relative to the horizontal to optimize solar exposure during the lunar day, generating electrical power to charge silver-zinc batteries for operational use and recharge cycles.[15][29] The system provided approximately 180 watts at peak, sufficient for propulsion, instrumentation, and transmission, but operations ceased at lunar sunset to conserve energy, with batteries supporting only standby modes.[19] Thermal management was achieved through a combination of passive insulation and active radioisotope heating. The rover's hermetically sealed eight-sided compartment, constructed from aluminum alloys, minimized heat loss via multilayer insulation and a closable lid that shielded internals during the lunar night, when surface temperatures dropped below -170°C. Polonium-210-fueled radioisotope heater units (RHUs), in the form of yttrium polonide pellets, supplied continuous thermal power—around 160 watts total from units containing slightly over 1 gram of the isotope—to prevent freezing of electronics, lubricants, and mechanisms, with the isotope's 138-day half-life imposing a strict operational timeline aligned with mission durations of several lunar months.[30][1] Communication systems enabled direct line-of-sight transmission to Earth-based stations, primarily during the 14-day lunar daylight periods when the rover was active. A steerable high-gain helical antenna, mounted on the compartment, handled high-bandwidth video feeds from the panoramic and navigation cameras, while a fixed cone-shaped medium-gain antenna and four low-gain omnidirectional antennas supported telemetry, telecommands, and lower-rate data links. The setup allowed real-time remote control by ground operators, with signal delays of about 1.3 seconds, though dust accumulation on antennas occasionally degraded performance, as observed in extended operations.[19][31]Scientific Instruments
The Lunokhod rovers carried a suite of instruments to analyze lunar regolith composition, mechanical properties, radiation levels, and surface imaging. Lunokhod 1, deployed on November 17, 1970, included television cameras for visual documentation of the surface, cosmic-ray detectors to measure ionizing radiation, an X-ray spectrometer for elemental analysis of soil, an X-ray telescope to observe solar X-ray emissions, and a laser reflector array consisting of a 3.7-kilogram French-built device with ten 14-centimeter prisms mounted above the forward cameras for Earth-based ranging experiments.[32][19][2][33] Geotechnical investigations were performed using a penetrometer and odometer system that extended to test soil density and bearing strength during traverses, functioning also as a rudimentary sampler by interacting with the regolith.[32][19] The cosmic-ray detectors recorded particle fluxes, contributing data on the lunar radiation environment.[32] Lunokhod 2, operational from January 16, 1973, retained core instruments like cameras for imaging, X-ray spectrometers for composition mapping, penetrometers for soil mechanics, and the laser retroreflector for continued ranging.[34][33] It added an astrophotometer to measure visible and ultraviolet light from celestial sources, revealing the lunar sky to be 10-15 times brighter post-sunset than Earth's, a magnetometer for magnetic field detection, and a radiometer/densitometer for thermal and density assessments.[34] These enhancements allowed broader environmental sampling during its 39-kilometer traverse in Le Monnier crater.[34]| Instrument Type | Primary Function | Deployed on Lunokhod 1 | Deployed on Lunokhod 2 |
|---|---|---|---|
| Television Cameras | Surface imaging and navigation | Yes | Yes |
| X-ray Spectrometer | Soil elemental composition | Yes | Yes |
| Penetrometer/Odometer | Soil mechanics and sampling | Yes | Yes |
| Laser Retroreflector | Lunar ranging | Yes | Yes |
| Cosmic-ray Detectors | Radiation measurement | Yes | Implied |
| Astrophotometer | Celestial light levels | No | Yes |
| Magnetometer | Magnetic fields | No | Yes |
| Radiometer | Thermal radiation | No | Yes |
Individual Missions
Lunokhod 201 Ground Tests
The Lunokhod 201, designated as spacecraft Ye-8 No. 201 under the Soviet Luna program, underwent rigorous pre-launch ground testing to validate its design for lunar surface operations following years of prototype development. These tests focused on mobility, thermal management, and systems integration, simulating key environmental challenges such as low gravity, vacuum conditions, and regolith interaction. Conducted primarily at facilities associated with the Lavochkin design bureau and specialized analog sites, the evaluations confirmed the rover's eight-wheeled chassis could traverse uneven terrain while supporting a payload of scientific instruments including penetrometers and spectrometers.[17] A key component of the testing involved the lunodrom, a 1-hectare (approximately 120 by 70 meters) terrestrial simulation facility replicating lunar mare-like topography with basaltic soil analogs and craters to assess wheel traction and obstacle navigation. In these trials, the rover demonstrated reliable forward speeds up to 2 km/h and turning radii suitable for remote control from Earth, addressing concerns over dust accumulation on skids and mirrors used for panoramic imaging. Thermal-vacuum chamber tests, performed in early 1969, exposed the vehicle to diurnal temperature swings from -150°C to +100°C, verifying the effectiveness of its lid mechanism for radiators and the polonium-210 heat source for overnight survival.[24] Additional evaluations included electromagnetic compatibility checks and operator training via ground control simulators, ensuring signal relay through the Luna lander to Earth stations. Soil mechanics experiments using the PROP-M penetrometer analog measured bearing strength in simulant materials, yielding data on penetration depths that informed final adjustments to wheel lug designs for 20-30 cm rut depths without bogging. Despite these validations, the mission proceeded to launch on February 19, 1969, where a Proton rocket failure prevented orbital insertion, rendering the ground-tested hardware lost.[35][36]Lunokhod 1 Deployment and Operations
Luna 17, carrying the Lunokhod 1 rover, launched from the Baikonur Cosmodrome on November 10, 1970, using a Proton rocket.[37] After two midcourse corrections, the spacecraft entered lunar orbit on November 15, 1970, and soft-landed in the Mare Imbrium at 03:46:50 UT on November 17, 1970, at coordinates approximately 38°18′ N, 35°01′ W.[38][39] Post-landing, mission controllers activated the rover, which transmitted its first television image of the lunar surface at 05:31 UT. Lunokhod 1 then descended the lander's ramps, completing the deployment at 06:28 UT, marking the first successful robotic rover operation on another celestial body.[40] Operations were conducted remotely from Earth, with a five-person team issuing over 5,000 commands despite the 1.5-second one-way radio delay, navigating the rover across craters, slopes up to 20 degrees, and regolith. The rover relied on eight wheels for mobility, solar panels for daytime power supplemented by radioisotope heaters, and entered dormancy during the cold lunar nights.[1][41][42] Intended for three lunar days (approximately 90 Earth days), Lunokhod 1 far exceeded expectations, operating for 322 Earth days across eleven lunar days until final contact on September 14, 1971, at 13:05 UT, likely due to thermal failure during a lunar night. During its mission, it traversed 10.5 kilometers, analyzed over 25 soil points with its penetrometer and X-ray spectrometer, and returned more than 20,000 television images plus 206 high-resolution panoramas.[1][40][15]Lunokhod 2 Deployment and Operations
Luna 21, carrying Lunokhod 2, launched from Baikonur Cosmodrome on January 8, 1973, at 06:55 UTC aboard a Proton rocket.[43] The spacecraft entered lunar orbit on January 12 and achieved a soft landing in Le Monnier crater on the eastern rim of Mare Serenitatis on January 15–16, 1973.[44][45] Following landing, the ascent stage opened to deploy the rover onto the surface, where it began operations on January 16 after initial imaging of the lander and site.[45] Lunokhod 2 was remotely controlled in near-real time by a five-person team on Earth via the rover's television cameras, traversing diverse terrain including mare plains, hilly uplands, and the Fossa Recta rille over five lunar days of activity.[46][45] The rover covered a total path length of 39.1 kilometers, exploring an area of approximately 180 km² with elevation changes up to 144 meters and slopes reaching 20.3 degrees.[45] Instruments such as the RIFMA-M X-ray fluorescence soil analyzer, magnetometer, and panoramic cameras collected data on lunar regolith composition, magnetic fields, and surface morphology, while a French-supplied laser reflector enabled ongoing lunar laser ranging experiments.[45] Operations ceased on May 10, 1973, after four Earth months, when the rover overheated during a lunar day and failed to awaken from hibernation.[45] This distance set an off-Earth traversal record held for over 40 years until surpassed by NASA's Opportunity rover in 2014.[47]Lunokhod 3 Development and Cancellation
Development of Lunokhod 3 proceeded following the operational success of Lunokhod 2 in 1973, as part of the Soviet Union's continued robotic lunar exploration efforts under the Luna programme.[3] The rover, designated as vehicle 8ЕЛ№205, was fully constructed by the Lavochkin design bureau for integration with the Luna 25 spacecraft, with a planned launch in 1977 targeting the lunar surface.[48] Intended to extend the capabilities demonstrated by its predecessors, Lunokhod 3 was prepared amid shifting priorities in the Soviet space program, which had already abandoned manned lunar landings after multiple N1 rocket failures and the Apollo program's achievements.[49] The mission's cancellation in 1977 stemmed primarily from insufficient funding and a shortage of available Proton launch vehicles, as resources were redirected toward orbital stations like Salyut and planetary probes to Venus.[3] [50] Despite being ready for deployment, Lunokhod 3 never left Earth, marking the end of the Lunokhod series; the rover is preserved and displayed at the Lavochkin Association Museum in Moscow.[51] This termination reflected broader post-Moon race fiscal constraints and strategic pivots in Soviet space policy, prioritizing sustained human presence in low Earth orbit over further lunar rovers.[52]Operational Achievements
Traverse Distances and Durability
Lunokhod 1 traversed 10.54 kilometers across the Mare Imbrium, operating for 11 lunar days from November 17, 1970, to September 4, 1971, far exceeding its nominal three-lunar-day lifespan.[1] This endurance stemmed from the rover's polonium-210 radioisotope heater, which prevented freezing during prolonged lunar nights averaging 14 Earth days each, while solar panels recharged batteries during daylight periods.[53] The vehicle's eight independently driven wheels and penetrometer-equipped legs enabled navigation over craters, rocks, and regolith slopes up to 30 degrees, contributing to its extended mobility without major mechanical failures.[2] Lunokhod 2 covered approximately 39 kilometers in the Le Monnier crater region over four lunar months from January 16 to May 1973, achieving higher average speeds of 0.34 km/h compared to its predecessor's 0.16 km/h due to enhanced motor controls and terrain adaptability.[54] Refined laser ranging and imaging data later revised this to 39.5-42 kilometers, underscoring the rover's efficiency in traversing varied terrain including rilles and hills.[55] Like Lunokhod 1, it relied on the same heating system for thermal survival, hibernating successfully through multiple nights despite dust accumulation on solar arrays that eventually limited operations.[56] Collectively, the Lunokhod missions demonstrated rover durability in the lunar vacuum and thermal extremes, with combined traverses exceeding 49 kilometers and operations spanning over a year in Earth time, validating uncrewed systems for long-term surface exploration.[57] These achievements highlighted the robustness of the 8-wheel skid-steering design against regolith adhesion and abrasion, though dust mitigation proved a key limitation for sustained power generation.[58]Data Acquisition and Analysis
The Lunokhod rovers acquired scientific data primarily through onboard instruments that conducted in-situ measurements of lunar regolith mechanics, chemical composition, and environmental parameters, with telemetry transmitted in real-time or via onboard recorders to ground stations during lunar daylight operations. Instruments included a penetrometer for soil penetration resistance, X-ray fluorescence spectrometers for elemental analysis, television cameras for panoramic imaging, and magnetometers for field measurements. Data transmission occurred via a directional UHF antenna, enabling operators in the Soviet Union to receive instrument readings, spectral data, and compressed video signals, which were then decoded and archived for post-mission processing.[19][21] For Lunokhod 1, the penetrometer—a conical probe with a 5.0 cm base diameter and 60° angle—measured penetration resistance across varied terrains during its 10.5 km traverse, yielding values from 0.2 to 1.0 kg/cm² (most frequently 0.34 kg/cm²) at depths up to 90 cm, with data collected over horizontal plains, crater slopes, and rocky areas. Wheel track imaging via television provided indirect mechanical data, allowing estimation of soil bearing capacity through track depth analysis, which indicated cohesive, fine-grained regolith with increasing shear strength at depth. X-ray spectrometers recorded energy spectra and intensities via a 64-channel analyzer, facilitating regolith composition studies at multiple sites. Over 20,000 television images and 206 high-resolution panoramas were transmitted, enabling morphological and topographic mapping.[59][60][19] Analysis of acquired data involved calibration of raw telemetry against ground simulations, conversion of forces to standardized units (e.g., kg to newtons), and modeling of soil properties such as compressibility and friction against rover materials. Penetrometer results were plotted as force per area versus depth, revealing regolith densities of 1.58 to 1.76 g/cm³ and good compactability, consistent with Apollo site comparisons. Track depth measurements from images estimated upper-layer bearing capacity, informing trafficability models. For Lunokhod 2, similar methods processed magnetometer data to map surface magnetic fields (mean values analyzed along traverses) and X-ray results for geochemical profiling, including potential outcrop identifications via relative spectral effects. Laser retroreflector returns enabled precise positioning and ongoing orbital ranging, with signals intercepted for libration studies. These analyses, grounded in empirical measurements rather than assumptions of uniformity, confirmed regolith variability and supported planetary mobility engineering.[59][61][62][63]Challenges and Limitations
Launch and Deployment Failures
The initial attempt to launch a Lunokhod rover occurred on February 19, 1969, with the Luna Ye-8 mission (serial number 201), which carried the first prototype rover intended for lunar deployment.[17] The Proton-K launch vehicle lifted off from Baikonur Cosmodrome but experienced a catastrophic failure at 51 seconds after ignition due to a first-stage engine malfunction caused by defective welding in a combustion chamber.[17] This resulted in the vehicle's destruction shortly after, preventing any orbital insertion or further mission progression.[3] The failure highlighted vulnerabilities in the untested integration of the heavy Lunokhod payload—approximately 756 kg including the lander—with the Proton upper stages and payload fairing, which had not been fully validated for such a configuration.[17] Debris from the explosion, including components from the rover's radioisotope thermoelectric generators powered by polonium-210, contaminated a region of the Kazakh steppe, though the Soviet space program's opacity at the time limited detailed public assessment of environmental or health impacts.[3] This incident delayed the programme by nearly two years, necessitating redesigns and additional ground validations before the successful Luna 17 launch of Lunokhod 1 on November 10, 1970.[9] Subsequent Lunokhod-related launches avoided similar early-flight disasters, but the 1969 event underscored the programme's reliance on iterative testing amid the competitive pressures of the Space Race, where reliability challenges in heavy-lift vehicles like the Proton contributed to a pattern of Soviet lunar mission setbacks prior to the rover successes.[17] No major deployment failures occurred in the operational missions that reached the lunar surface, as the rovers' unfolding mechanisms—deployed via ramps from the Luna landers—functioned as designed for Lunokhod 1 and 2, though these successes followed extensive pre-flight simulations to mitigate risks exposed by the initial loss.[1]In-Situ Technical Issues
During operations on the lunar surface, Lunokhod 1 encountered challenges with thermal management, as internal components and the solar battery lid reached temperatures up to +140°C during daytime traverses, necessitating pauses to avoid system overload despite the rover's design for radiative cooling.[15] Dust accumulation on exposed solar panels further complicated power generation, with regolith particles adhering due to electrostatic charging and solar heating, reducing efficiency and exacerbating overheating risks as the darkened dust absorbed more radiation.[64] Wheel sinkage in loose regolith, measuring 10.7 to 25.4 mm under the rover's 94.5 kg per wheel load, occasionally hindered mobility, requiring operators to navigate cautiously to prevent entrapment in softer soils.[65] Lunokhod 2 faced similar thermal constraints but with acute escalation in its final days; on May 9, 1973, while traversing toward Far Cape hill, the rover scraped a crater wall, dislodging dust that partially covered its solar panel and contributed to impaired cooling, though not the sole factor in failure.[66] By May 10, 1973, internal temperatures climbed to 47°C, triggering an automatic shutdown to protect electronics from exceeding operational limits around 65.5°C.[66][3] An earlier control anomaly on February 11, 1973, saw the rover ignore a stop command, resolved only by activating a secondary scrambler, highlighting vulnerabilities in the remote manual piloting system reliant on Earth-based operators.[66] Communications ceased permanently on May 10, 1973, at 15:25 Moscow time, attributed to degradation of transmitters beyond their design lifespan rather than dust or terrain alone.[66] Both rovers demonstrated resilience against anticipated lunar night extremes through sealed hibernation modes, but daytime in-situ operations revealed limitations in dust mitigation and heat dissipation, as the absence of atmosphere prevented convective cooling and amplified solar albedo effects.[46] These issues underscored the trade-offs in the Lunokhod design's emphasis on short-burst mobility over autonomous fault recovery, with cumulative regolith interactions progressively degrading performance despite pre-mission ground simulations.[67]Comparative Shortcomings Versus Manned Missions
Despite their pioneering role in robotic lunar mobility, the Lunokhod rovers exhibited significant limitations in adaptability compared to the manned Apollo missions, primarily due to reliance on remote control from Earth. Communication delays of approximately 1.3 seconds one-way (2.6 seconds round-trip) necessitated predictive operation by ground controllers, who had to anticipate rover movements and terrain hazards without immediate feedback, often resulting in cautious, incremental advances and frequent stops for imaging.[68][69] This contrasted sharply with Apollo astronauts' ability to make instantaneous judgments, such as identifying geological features or adjusting paths in real time during extravehicular activities, enabling serendipitous discoveries that rigid robotic protocols could not replicate.[70][71] Traversal efficiency further highlighted these shortcomings, as Lunokhod 1 covered only 10.5 kilometers over 322 Earth days of operation, averaging mere tens of meters per active session limited by thermal constraints, low-speed maneuvers (maximum 2 km/h but typically slower for safety), and intermittent control windows.[72][15] Apollo missions, by comparison, achieved far greater ground coverage in condensed periods; for instance, Apollo 17's Lunar Roving Vehicle traversed 35.7 kilometers in three days, supported by human-driven navigation that allowed rapid scouting and return to the lander.[71] The rovers' eight-wheeled design provided stability over rough regolith but lacked the dexterity for tasks requiring manual intervention, such as precise sample selection or instrument deployment beyond automated arms.[2] Scientifically, the absence of human geologists curtailed the depth of analysis and sample acquisition. Lunokhod missions yielded in-situ data from spectrometers, X-ray instruments, and over 20,000 images but returned no physical samples, limiting post-mission laboratory scrutiny to remote interpretations prone to instrumental biases.[3] Apollo crews, trained in field geology, collected 382 kilograms of diverse regolith and rock samples across six sites, selected for contextual relevance, which continue to fuel peer-reviewed publications decades later—demonstrating orders-of-magnitude higher productivity per unit time than robotic equivalents.[70][71] These factors underscored the rovers' role as precursors rather than equivalents to human exploration, where on-site cognition amplified empirical yields beyond what teleoperation could achieve.[71]Scientific and Technological Legacy
Contributions to Lunar Science
The Lunokhod rovers conducted pioneering in-situ experiments that provided empirical data on lunar regolith mechanics, enabling estimates of soil shear strength and cohesion from wheel track depths and penetrometer probes. Lunokhod 1's traversals in Mare Imbrium revealed increasing soil density and strength parameters with depth, with cohesion values around 0.1-1 kPa in surface layers based on track deformation analysis during its 11 lunar days of operation from November 1970 to September 1971.[73] Similar measurements by Lunokhod 2 in Le Monnier crater during its four lunar days in 1973 extended these findings to highland-mare transition zones, confirming frictional angles of approximately 30-40 degrees and aiding models of regolith compaction from micrometeorite impacts.[74] These results, derived from direct mechanical interactions rather than remote sensing, offered causal insights into regolith behavior under rover loads, informing subsequent engineering for planetary mobility.[75] Geochemical analysis via onboard X-ray spectrometers on both rovers yielded composition data for surface materials, identifying elevated titanium and iron oxides consistent with basaltic mare basalts in sampled areas. Lunokhod 1's spectrometer scans during 5,000-meter traverses detected variations in aluminum and magnesium abundances, correlating with geological features like small craters and ridges observed in over 20,000 transmitted images.[76] Lunokhod 2's extended 37-kilometer path further mapped elemental gradients near highland contacts, contributing to understandings of volcanic emplacement and impact gardening processes without reliance on returned samples.[77] Panoramic imaging supported topographic mapping, revealing micro-relief scales down to centimeters that validated first-order models of regolith evolution through ballistic sedimentation and electrostatic transport.[78] The French-built retroreflectors on Lunokhod 1 and 2, each comprising 14 corner cubes, facilitated lunar laser ranging (LLR) experiments that have generated precise geodetic data since 1970 and 1973, respectively. These arrays enabled millimeter-level distance measurements, yielding the Moon's orbital recession rate of 3.82 ± 0.07 cm/year and constraints on the lunar moment of inertia, indicative of a fluid core.[79] LLR signals from Lunokhod 1, rediscovered in 2010 after initial detection challenges, have supported tests of general relativity, including equivalence principle violations below 10^{-13}, and refined lunar libration models due to its equatorial position near the limb.[63] Lunokhod 2's reflector, though weaker due to possible dust accumulation, complemented Apollo arrays in multi-site geodesy, enhancing causal models of tidal dissipation and Earth-Moon system dynamics. These ongoing observations underscore the rovers' enduring role in lunar geophysics, independent of manned sample returns.[82]Influence on Subsequent Rover Programs
The Lunokhod programme established the viability of wheeled robotic vehicles for extraterrestrial surface exploration, with Lunokhod 1 becoming the first successful planetary rover upon landing on November 17, 1970, and operating for 11 lunar days while traversing 10.5 km of lunar terrain.[1] This achievement demonstrated remote teleoperation over interplanetary distances, using a high-gain antenna for real-time control from Earth, which informed early concepts for rover missions despite the limitations of signal delay for deeper space targets like Mars.[83] Subsequent programmes, including NASA's Mars Pathfinder Sojourner in 1997, built on this precedent by prioritizing mobility for in-situ analysis, though shifting toward partial autonomy to address communication latencies exceeding 10 minutes one-way to Mars.[23] Key technological contributions included the eight-wheel drive system with independent suspension and grousers—chevron-shaped treads for regolith traction—developed under Aleksander Kemurdjian, which optimized traversal over uneven, low-gravity surfaces and influenced locomotion designs in later vehicles.[84] These features were adapted for Soviet proposals like Marsokhod and extended to international projects, such as wheel prototypes for ESA's Beagle 2 Mars lander in the early 2000s, emphasizing durability against abrasive soils.[21] Lunokhod 2's extended path of 39 km, achieved from January to June 1973, held the off-Earth driving distance record for 41 years until NASA's Opportunity rover surpassed it on July 28, 2014, after 11 years of operation, highlighting the programme's benchmarks for endurance and path planning.[85] Operational insights from Lunokhod missions, including dust mitigation via deployable mirrors to concentrate sunlight on solar panels and radioisotope thermal units for extreme temperature swings, addressed challenges like regolith adhesion that later affected Mars rovers.[66] NASA engineers referenced these experiences in workshops, such as the 2004 International Planetary Rovers and Robotics Workshop, to refine thermal management and power systems for the Mars Exploration Rovers Spirit and Opportunity, which operated far beyond initial 90-sol lifespans.[86] The programme's emphasis on integrated lander-rover deployment also shaped conjoined architectures in missions like China's Yutu-2 on the lunar far side in 2019, underscoring scalable robotics for sustained scientific return over human-crewed alternatives.[87] Beyond extraterrestrial applications, Lunokhod technology influenced terrestrial disaster response efforts. In 1986, following the Chernobyl nuclear disaster, STR-1 robots derived from the Lunokhod design were deployed to clear highly radioactive debris from the reactor roof. These robots leveraged radiation-hardened electronics and a durable chassis originally developed to withstand cosmic radiation, enabling remote operation in the hazardous environment. However, the extreme gamma radiation levels proved too intense, causing system failures and necessitating reliance on human liquidators to complete the task.[88][48][89]Ongoing Utility and Preservation
The retroreflectors deployed by Lunokhod 1 and Lunokhod 2 continue to serve as active targets for lunar laser ranging (LLR) experiments, enabling precise measurements of the Earth-Moon distance and tests of general relativity.[90] The French-built retroreflector on Lunokhod 1, operational since November 1970, was relocated in April 2010 using images from NASA's Lunar Reconnaissance Orbiter (LRO) to guide ground-based lasers from Apache Point Observatory, yielding ranging data after 39 years of dormancy.[91] Subsequent successful laser returns from Lunokhod 1 were achieved in April 2013 by the Lunar Laser Ranging Station at McDonald Observatory, confirming the reflector's functionality despite decades of exposure to lunar conditions.[92] Lunokhod 2's retroreflector array, visible in mission imagery, similarly supports LLR contributions alongside Apollo sites, with collective data from these Soviet assets enhancing long-term gravitational models.[93] Both rovers' physical remnants on the lunar surface have been preserved in situ and documented through high-resolution orbital imaging, providing visual evidence of their final configurations and degradation states. LRO's Lunar Reconnaissance Orbiter Camera (LROC) captured detailed images of Lunokhod 1 in its parking position in Mare Imbrium (38.315°N, 324.992°E) as early as July 2009, revealing the rover's eight wheels and shadowed tub-shaped body after 10.5 km of traverse.[72] Similarly, LROC revisited Lunokhod 2 near the Luna 21 lander in Le Monnier crater, confirming its orientation and proximity to the retroreflector site used for ranging.[94] These images, taken between 2009 and 2013, allow assessment of micrometeorite impacts, dust accumulation, and thermal degradation without physical disturbance, underscoring the rovers' enduring structural integrity in vacuum.[95] Archival data from the programme, including over 20,000 panoramic images and soil analyses, undergoes modern digital restoration and photogrammetric processing to integrate with contemporary orbital datasets. Techniques developed since 2014 combine Lunokhod panoramas with LROC topography for refined 3D mapping of traverse paths and landing sites, revealing details such as regolith properties inaccessible during original operations.[96] Efforts by international teams, supported by EU grants like PRoViDE, digitize and calibrate these scans for public and scientific access, enabling reanalysis of geochemical samples and seismic data that align with later missions like Chang'e.[97] Preservation initiatives mitigate data loss from analog formats, with recovered telemetry aiding validation of rover autonomy models for future uncrewed exploration.[98]References
- https://science.[nasa](/page/NASA).gov/wp-content/uploads/2023/05/38_77091c49a38e571079581a13d63ffd65_TuryshevSlavaG.pdf
- https://www.[nasa](/page/NASA).gov/missions/laser-beams-reflected-between-earth-and-moon-boost-science/