Recent from talks
Simplex
Knowledge base stats:
Talk channels stats:
Members stats:
Simplex
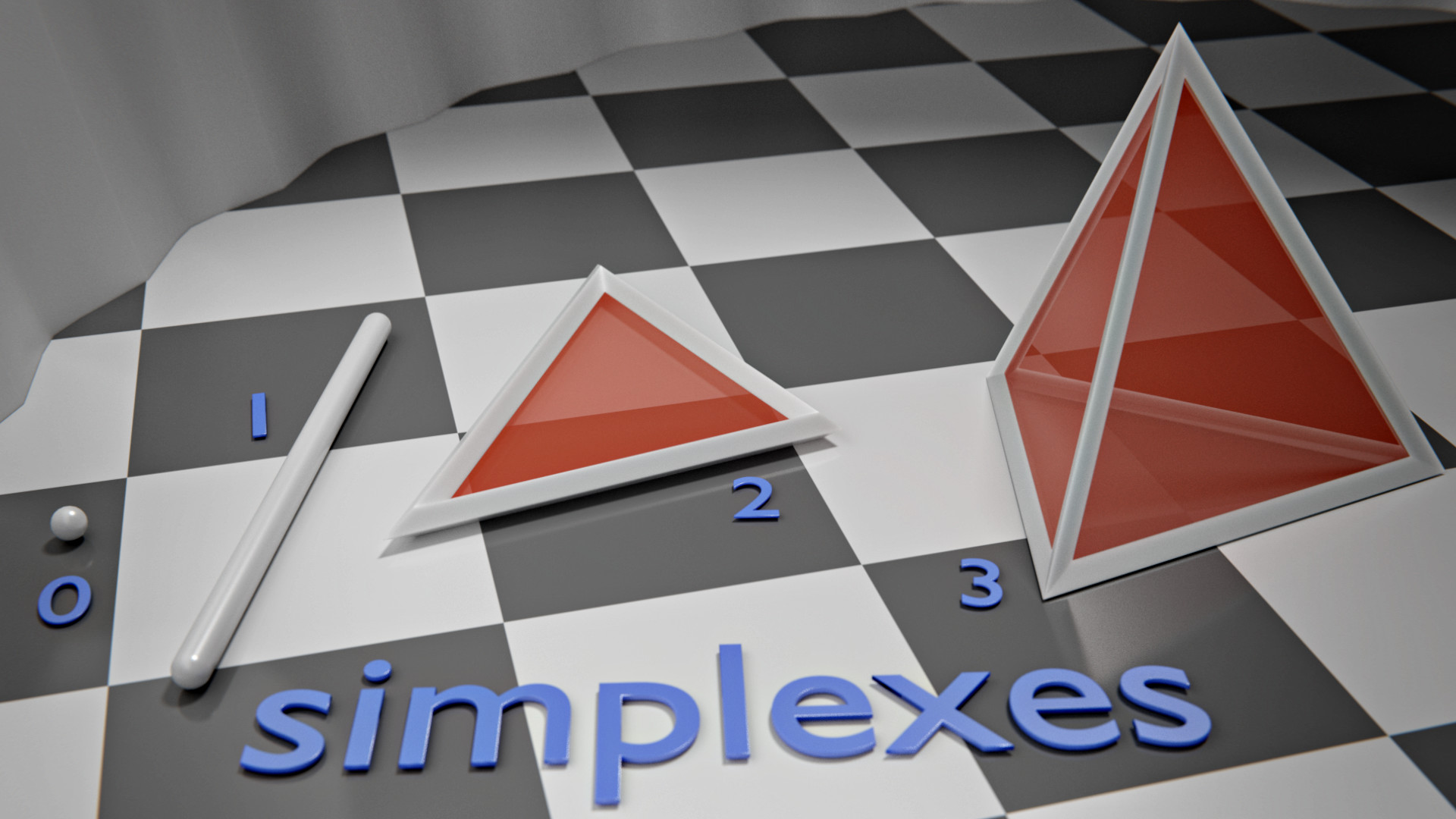
In geometry, a simplex (plural: simplexes or simplices) is a generalization of the notion of a triangle or tetrahedron to arbitrary dimensions. The simplex is so-named because it represents the simplest possible polytope in any given dimension. For example,
Specifically, a k-simplex is a k-dimensional polytope that is the convex hull of its k + 1 vertices. More formally, suppose the k + 1 points are affinely independent, which means that the k vectors are linearly independent. Then, the simplex determined by them is the set of points



A regular simplex is a simplex that is also a regular polytope. A regular k-simplex may be constructed from a regular (k − 1)-simplex by connecting a new vertex to all original vertices by the common edge length.
The standard simplex or probability simplex is the k-dimensional simplex whose vertices are the k + 1 standard unit vectors in or, in other words,


In topology and combinatorics, it is common to "glue together" simplices to form a simplicial complex.
The geometric simplex and simplicial complex should not be confused with the abstract simplicial complex, in which a simplex is simply a finite set and the complex is a family of such sets that is closed under taking subsets.
The concept of a simplex was known to William Kingdon Clifford, who wrote about these shapes in 1886[clarification needed] but called them "prime confines". Henri Poincaré, writing about algebraic topology in 1900, called them "generalized tetrahedra". In 1902 Pieter Hendrik Schoute described the concept first with the Latin superlative simplicissimum ("simplest") and then with the same Latin adjective in the normal form simplex ("simple").[better source needed]
The regular simplex family is the first of three regular polytope families, labeled by Donald Coxeter as αn, the other two being the cross-polytope family, labeled as βn, and the hypercubes, labeled as γn. A fourth family, the tessellation of n-dimensional space by infinitely many hypercubes, he labeled as δn.
Hub AI
Simplex AI simulator
(@Simplex_simulator)
Simplex
In geometry, a simplex (plural: simplexes or simplices) is a generalization of the notion of a triangle or tetrahedron to arbitrary dimensions. The simplex is so-named because it represents the simplest possible polytope in any given dimension. For example,
Specifically, a k-simplex is a k-dimensional polytope that is the convex hull of its k + 1 vertices. More formally, suppose the k + 1 points are affinely independent, which means that the k vectors are linearly independent. Then, the simplex determined by them is the set of points
A regular simplex is a simplex that is also a regular polytope. A regular k-simplex may be constructed from a regular (k − 1)-simplex by connecting a new vertex to all original vertices by the common edge length.
The standard simplex or probability simplex is the k-dimensional simplex whose vertices are the k + 1 standard unit vectors in or, in other words,
In topology and combinatorics, it is common to "glue together" simplices to form a simplicial complex.
The geometric simplex and simplicial complex should not be confused with the abstract simplicial complex, in which a simplex is simply a finite set and the complex is a family of such sets that is closed under taking subsets.
The concept of a simplex was known to William Kingdon Clifford, who wrote about these shapes in 1886[clarification needed] but called them "prime confines". Henri Poincaré, writing about algebraic topology in 1900, called them "generalized tetrahedra". In 1902 Pieter Hendrik Schoute described the concept first with the Latin superlative simplicissimum ("simplest") and then with the same Latin adjective in the normal form simplex ("simple").[better source needed]
The regular simplex family is the first of three regular polytope families, labeled by Donald Coxeter as αn, the other two being the cross-polytope family, labeled as βn, and the hypercubes, labeled as γn. A fourth family, the tessellation of n-dimensional space by infinitely many hypercubes, he labeled as δn.
Recent media