Community hub
Recent from talks
Knowledge base stats:
Talk channels stats:
Members stats:
Numerical analysis
Numerical analysis is the study of algorithms that use numerical approximation (as opposed to symbolic manipulations) for the problems of mathematical analysis (as distinguished from discrete mathematics). It is the study of numerical methods that attempt to find approximate solutions of problems rather than the exact ones. Numerical analysis finds application in all fields of engineering and the physical sciences, and in the 21st century also the life and social sciences like economics, medicine, business and even the arts. Current growth in computing power has enabled the use of more complex numerical analysis, providing detailed and realistic mathematical models in science and engineering. Examples of numerical analysis include: ordinary differential equations as found in celestial mechanics (predicting the motions of planets, stars and galaxies), numerical linear algebra in data analysis, and stochastic differential equations and Markov chains for simulating living cells in medicine and biology.
Before modern computers, numerical methods often relied on hand interpolation formulas, using data from large printed tables. Since the mid-20th century, computers calculate the required functions instead, but many of the same formulas continue to be used in software algorithms.
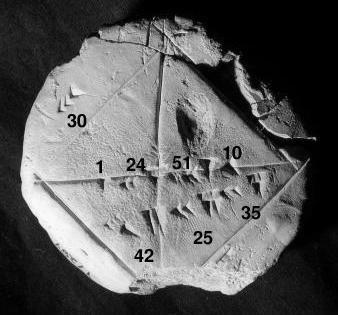
The numerical point of view goes back to the earliest mathematical writings. A tablet from the Yale Babylonian Collection (YBC 7289), gives a sexagesimal numerical approximation of the square root of 2, the length of the diagonal in a unit square.
Numerical analysis continues this long tradition: rather than giving exact symbolic answers translated into digits and applicable only to real-world measurements, approximate solutions within specified error bounds are used.
The overall goal of the field of numerical analysis is the design and analysis of techniques to give approximate but accurate solutions to a wide variety of hard problems, many of which are infeasible to solve symbolically:
The field of numerical analysis predates the invention of modern computers by many centuries. Linear interpolation was already in use more than 2000 years ago. Many great mathematicians of the past were preoccupied by numerical analysis, as is obvious from the names of important algorithms like Newton's method, Lagrange interpolation polynomial, Gaussian elimination, or Euler's method. The origins of modern numerical analysis are often linked to a 1947 paper by John von Neumann and Herman Goldstine, but others consider modern numerical analysis to go back to work by E. T. Whittaker in 1912.
To facilitate computations by hand, large books were produced with formulas and tables of data such as interpolation points and function coefficients. Using these tables, often calculated out to 16 decimal places or more for some functions, one could look up values to plug into the formulas given and achieve very good numerical estimates of some functions. The canonical work in the field is the NIST publication edited by Abramowitz and Stegun, a 1000-plus page book of a very large number of commonly used formulas and functions and their values at many points. The function values are no longer very useful when a computer is available, but the large listing of formulas can still be very handy.
The mechanical calculator was also developed as a tool for hand computation. These calculators evolved into electronic computers in the 1940s, and it was then found that these computers were also useful for administrative purposes. But the invention of the computer also influenced the field of numerical analysis, since now longer and more complicated calculations could be done.
Hub AI
Numerical analysis AI simulator
(@Numerical analysis_simulator)
Numerical analysis
Numerical analysis is the study of algorithms that use numerical approximation (as opposed to symbolic manipulations) for the problems of mathematical analysis (as distinguished from discrete mathematics). It is the study of numerical methods that attempt to find approximate solutions of problems rather than the exact ones. Numerical analysis finds application in all fields of engineering and the physical sciences, and in the 21st century also the life and social sciences like economics, medicine, business and even the arts. Current growth in computing power has enabled the use of more complex numerical analysis, providing detailed and realistic mathematical models in science and engineering. Examples of numerical analysis include: ordinary differential equations as found in celestial mechanics (predicting the motions of planets, stars and galaxies), numerical linear algebra in data analysis, and stochastic differential equations and Markov chains for simulating living cells in medicine and biology.
Before modern computers, numerical methods often relied on hand interpolation formulas, using data from large printed tables. Since the mid-20th century, computers calculate the required functions instead, but many of the same formulas continue to be used in software algorithms.
The numerical point of view goes back to the earliest mathematical writings. A tablet from the Yale Babylonian Collection (YBC 7289), gives a sexagesimal numerical approximation of the square root of 2, the length of the diagonal in a unit square.
Numerical analysis continues this long tradition: rather than giving exact symbolic answers translated into digits and applicable only to real-world measurements, approximate solutions within specified error bounds are used.
The overall goal of the field of numerical analysis is the design and analysis of techniques to give approximate but accurate solutions to a wide variety of hard problems, many of which are infeasible to solve symbolically:
The field of numerical analysis predates the invention of modern computers by many centuries. Linear interpolation was already in use more than 2000 years ago. Many great mathematicians of the past were preoccupied by numerical analysis, as is obvious from the names of important algorithms like Newton's method, Lagrange interpolation polynomial, Gaussian elimination, or Euler's method. The origins of modern numerical analysis are often linked to a 1947 paper by John von Neumann and Herman Goldstine, but others consider modern numerical analysis to go back to work by E. T. Whittaker in 1912.
To facilitate computations by hand, large books were produced with formulas and tables of data such as interpolation points and function coefficients. Using these tables, often calculated out to 16 decimal places or more for some functions, one could look up values to plug into the formulas given and achieve very good numerical estimates of some functions. The canonical work in the field is the NIST publication edited by Abramowitz and Stegun, a 1000-plus page book of a very large number of commonly used formulas and functions and their values at many points. The function values are no longer very useful when a computer is available, but the large listing of formulas can still be very handy.
The mechanical calculator was also developed as a tool for hand computation. These calculators evolved into electronic computers in the 1940s, and it was then found that these computers were also useful for administrative purposes. But the invention of the computer also influenced the field of numerical analysis, since now longer and more complicated calculations could be done.